Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
Movimiento lineal para el manejo robótico en almacenes automatizados
{{{sourceTextContent.subTitle}}}
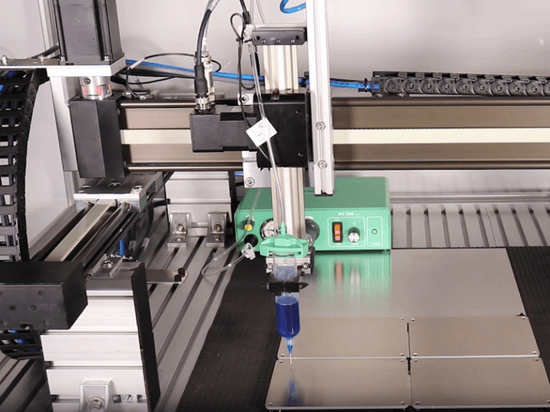
Sistema de selección y colocación de tubos de ensayo
{{{sourceTextContent.description}}}
Al diseñar y configurar un almacén automatizado, uno de los objetivos de diseño es mantener el sistema lo más ligero y compacto posible. Dependiendo del tamaño de la carga que se traslada, existen dos tipos comunes de almacenes automatizados. En aplicaciones más ligeras, las estructuras de aluminio pueden manejar cargas de hasta 100 kilogramos, mientras que las estructuras de acero son buenas para cargas más pesadas de más de 100 kilogramos.
La mayoría de los almacenes tradicionales utilizan carretillas elevadoras de altura limitada, mientras que los almacenes automatizados aprovechan el espacio vertical. La elección de los componentes adecuados es clave para garantizar que un sistema de almacenamiento automatizado optimice la gestión logística. Y los actuadores lineales son un buen punto de partida.
Las pistas de rodadura endurecidas por inducción de los rieles telescópicos, que a menudo se utilizan para el brazo de preparación de pedidos en lanzaderas de almacenamiento automatizadas, ofrecen unas propiedades de marcha óptimas. Presentan poca deflexión cuando se someten a cargas pesadas, incluso cuando están completamente extendidas.
Una reciente aplicación de manipulación crítica en la industria médica utilizó actuadores lineales para dar una nueva apariencia a este almacén automatizado.
Este sistema de selección y colocación mueve contenedores de tubos de ensayo para análisis de sangre en un almacén refrigerado. El robot se desplaza a lo largo de una red de ejes hasta llegar a las estanterías situadas a lo largo de los pasillos del almacén automatizado, adoptando una trayectoria perpendicular y cambiando de dirección en 90 grados. Para complicar aún más la situación, existe la posibilidad de que haya superficies irregulares en las que los rieles se deslizan.
A medida que el robot pasa de una pista a otra perpendicular, este tipo de manipulación se gestiona con rodamientos de bolas recirculantes comunes que necesitan alineaciones precisas. Al mismo tiempo, la configuración de un sistema de deslizamiento con ruedas o un conjunto de rodamientos sobre los raíles no garantiza la estabilidad y precisión necesarias para la colocación de los objetos.
La tarea consistía en encontrar la solución adecuada para estas operaciones de manipulación y una configuración fiable para todo el sistema.
Dado que el cliente necesitaba movimientos suaves y precisos a lo largo del eje X, Rollon recomendó su raíl compacto para gestionar los movimientos robóticos del sistema y ayudarlo a alcanzar y recoger los tubos de ensayo colocados en las estanterías del almacén. Disponibles con diferentes perfiles y un deslizador que encaja en un perfil de carril, estos carriles lineales vienen con pistas de rodadura endurecidas que absorben cualquier desalineación superficial.
Rollon gestionó el paso del eje X al eje Y montando otro par de correderas en el carro para sostener y mover el robot, así como dos secciones de raíles colocados perpendicularmente al primer conjunto. Cuando el carro alcanza la posición lateral, se desengancha del eje principal, y dos correderas adicionales entran en los rieles perpendiculares y guían al robot a lo largo del eje Y. El cómodo tamaño del rodamiento compacto de carril ayuda a gestionar con relativa facilidad el paso de las correderas desde los tramos de carril del carro hasta las vías de carril perpendiculares. Fabricado en acero templado, este sistema consta de pistas de rodadura templadas y deslizadores radiales de rodamientos de bolas de alta precisión.