Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Novedades de la industria
{{{sourceTextContent.title}}}
La robótica humanoide exige destreza en el movimiento
{{{sourceTextContent.subTitle}}}
La tecnología de accionamiento da vida a las manos robóticas
{{{sourceTextContent.description}}}
La mano es quizá la herramienta humana más utilizada. Su destreza, motricidad fina y retroalimentación sensorial la convierten en la interfaz entre el cuerpo y el entorno. Reproducir esta fascinante funcionalidad en una mano artificial es uno de los mayores retos de la robótica, y al mismo tiempo una de sus tareas más difíciles. Tanto en automatización como en robótica médica, aplicaciones industriales o prótesis modernas, se espera que las manos robóticas hagan lo que la mano humana ha perfeccionado a lo largo de miles de años: coordinar movimientos complejos, utilizar distintas técnicas de agarre, reaccionar a estímulos externos y emplear la fuerza con precisión. No se trata sólo de forma y movilidad, sino también de motores en miniatura, control inteligente y capacidad de adaptación a condiciones ambientales cambiantes.
La mano humana es una integración muy compleja y afinada de 27 huesos, más de 30 articulaciones y músculos, así como numerosos tendones para conseguir la máxima flexibilidad y control. Para una mano artificial, esto significa que debe diseñarse para ser robusta y flexible, ligera y estable, además de compacta y eficiente. Se trata de un juego de equilibrios que exige mucho de los materiales, el diseño y, sobre todo, la tecnología de accionamiento Los motores eléctricos garantizan movimientos potentes, los sensores proporcionan la información necesaria y los sistemas de control inteligentes coordinan los procesos en tiempo real. En resumen, para que una mano robótica se mueva de la forma más parecida posible a la humana, necesita precisión y unos componentes internos bien afinados. El objetivo es crear una simbiosis de tecnología y biología que ayude a recuperar habilidades perdidas o a ampliar las capacidades humanas. La transición entre la robótica humanoide y las prótesis modernas es fluida. Ambas disciplinas utilizan principios técnicos similares para permitir movimientos que se aproximen lo más posible al modelo humano.
Motricidad fina
Los robots humanoides constituyen la transición entre la inteligencia artificial y el mundo físico real. Sus manos no son meras herramientas, sino medios de expresión e interacción. La calidad de las secuencias de movimiento -la suavidad, potencia o precisión con que se ejecutan- depende en gran medida de la tecnología de accionamiento subyacente. Miniaturización, precisión, dinámica y eficiencia energética no son sólo palabras de moda, sino factores clave del éxito. Sólo cuando estos elementos interactúan a la perfección es posible conseguir que los movimientos parezcan tan naturales que apenas se note la diferencia entre el humano y el robot. La alta eficiencia energética desempeña un papel especialmente importante, ya que el espacio y las fuentes de energía son limitados y el accionamiento debe funcionar de forma fiable.
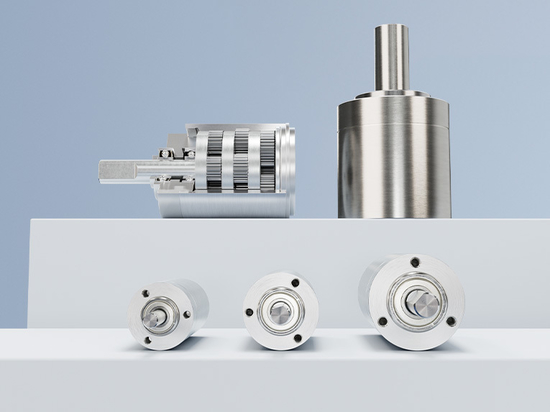
Para poder mover individualmente los dedos de una mano robótica o protésica, cada dedo es accionado por uno o varios actuadores. A menudo se utilizan más de 20 accionamientos por mano para permitir las secuencias de movimiento más complejas. Huelga decir que los accionamientos, que suelen constar de motor, codificador, reductor planetario, husillo y controlador, deben ser extremadamente compactos. Sólo así es posible organizar los dedos individualmente en diferentes patrones de agarre, desde movimientos delicados hasta potentes procesos de agarre. Los motores de corriente continua de la familia SXR de FAULHABER son especialmente adecuados para esta exigente aplicación. Gracias a su innovadora geometría de bobinado, sus imanes de tierras raras de alto rendimiento y las diversas opciones de combinación de reductores planetarios de alta precisión, ofrecen las condiciones ideales para su uso en manos artificiales.
Una mano llena de posibilidades
FAULHABER cuenta con décadas de experiencia en el desarrollo y la producción de sistemas de accionamiento de alta precisión y conoce los requisitos especiales que las manos robóticas y las prótesis modernas imponen a la tecnología. Los micromotores de FAULHABER se utilizan en todo el mundo en prótesis médicas de alta gama, así como en sistemas robóticos. Permiten lo que durante mucho tiempo se ha considerado movimientos visionarios, potentes, sensibles y dinámicos en los espacios más reducidos. Ya sea en el cuerpo humano o en un robot humanoide, la calidad de cada movimiento comienza con el accionamiento adecuado.