Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
La innovación va de común acuerdo
Los cordones del lazo, ropa de cama del doblez, rasgón abren un bolso de patatas a la inglesa - la lista de cosas que sean difíciles de hacer con una mano va sin cesar.
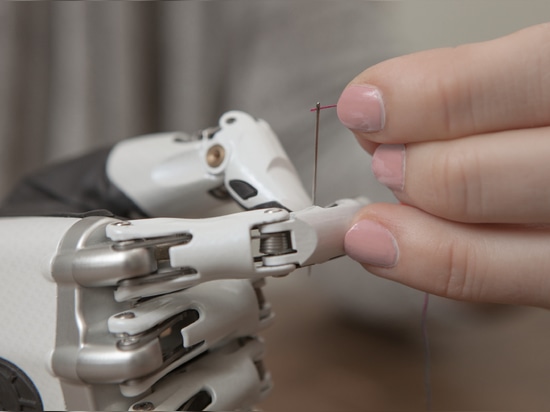
Enfrentan a la gente con una amputación congénita o que ha perdido una mano con un accidente o una enfermedad con tales obstáculos cada día. Para hacer vida de cada día más fácil, la compañía británica más escarpada desarrolló la prótesis myoelectric bebionic de la mano. Es controlada por las señales myoelectric generadas de contracciones del músculo en el brazo y puede realizar diversos modelos múltiples del apretón seleccionados por el usuario. La innovación más reciente trae al mercado las mujeres convenientes de la pequeña mano bebionic, los hombres de una estatura más pequeña o a los adolescentes. Los motores de la densidad de poder más elevado de FAULHABER se aseguran de que la prótesis pueda agarrar suavemente, rápidamente y firmemente y conservar la fuerza del apretón sin la relajación.
Las prótesis funcionales se saben la mayor parte de a nosotros solamente en las películas de ciencia ficción que dan a extremidades artificiales fuerza sobrehumana. Por el contrario, las prótesis biónicas de la mano no hacen el portador a un super héroe en la vida real. Pero pueden hacer muchas cosas posibles para ellas que sean normales para la mayoría de la gente. Encantan a Nicky Ashwell, el primer usuario de la pequeña mano bebionic finalmente para poder montar una bici: “Nunca la intenté antes porque tenía miedo de caer apagado la bici en superficies desiguales o de poner mi parte posterior bajo clase incorrecta de tensión.”
Movimiento intuitivo
La prótesis myoelectric bebionic pesa entre 400 y 600 gramos y es alrededor tan pesada como una mano natural. Se controla usando las señales eléctricas minúsculas en el cuerpo. Se generan éstos cuando un músculo contrata y se puede detectar con los electrodos en la piel
- la misma manera que un ECG en diagnósticos del corazón. Dos electrodos se integran en el zócalo de la prótesis, que detectan la señal eléctrica del myo y son delanteros ellos a
electrónica de control. Se amplifican y se utilizan estas señales de activar los cinco pequeños motores eléctricos (uno para cada dígito), que mueven los fingeres y el pulgar que hacen la mano abrirse y cerrarse. Como consecuencia, la fuerza de la contracción del músculo controla la velocidad y la fuerza conmovedora: una señal débil genera un movimiento lento, una señal fuerte genera un movimiento rápido. Los músculos que se utilizan para abrir y para cerrar la prótesis de la mano son realmente responsables del movimiento de la muñeca en una mano natural. Su portador debe aprender que ahora tiene una diversa función. “El cerebro humano es increíble adaptable. Después de una pequeña cantidad de hora, la gente realiza el movimiento intuitivo como cómo los conductores de coche caminan en el freno cuando quieren parar,” dicen a Ted Varley, director técnico en más escarpado.
Motores adicionales para más control
La primera mano myoelectric vino sobre el mercado al inicio de los años 80. Fueron conducidos por un solo motor y tenían solamente un mecanismo conmovedor simple: el pulgar, el índice y los dedos medios podían ser cerrados para un apretón de las tenazas. El anillo y los pequeños fingeres estaban solamente disponibles por razones cosméticas y no tenían ninguna fuerza conmovedora. Este concepto fue cambiado fundamental por hace los alrededor diez años bebionic. “Determinamos que la gente acepta una fuerza conmovedora más baja por el finger si ella consigue más flexibilidad,” explica Ted
Varley. Para controlar los fingeres individuales, cada finger en la mano bebionic se equipa de su propio motor eléctrico. Los cuatro motores para los fingeres están situados en la palma de la mano, el quinto situado en el pulgar sí mismo. Los codificadores se integran en los motores que detectan exacto la posición del finger en cualquier momento.
Los gracias al control individual, los fingeres se pueden arreglar en un total de 14 diversos modelos del apretón. El apretón dominante, que mueve el pulgar hacia arriba y hacia abajo con los fingeres doblados le permite llevar a cabo artículos planos tales como placas, llaves o tarjetas de banco. El apretón de gancho permite a las cargas pesadas de hasta 25 kilogramos ser llevado, y en el caso del dedo índice extendido el uso de teclados y de mandos a distancia se permite. Con el apretón del poder, el pulgar está en la posición opuesta y todos los fingeres cercanos hasta que ellos
resistencia del encuentro. Esto se utiliza para abrochar objetos de forma irregular tales como copas de vino. “Esta posición parece mucho más natural que un apretón de las tenazas y proporciona un apretón mucho más estable cuando se utilizan todos los fingeres,” subraya Varley.
Para cambiar entre los modelos individuales del apretón, el portador bebionic también utiliza los músculos del brazo. Si se da otra señal “abierta” cuando la mano está ya abierta, los cambios de la prótesis en el modo siguiente. Una señal adicional es proporcionada por el pulgar que se mueve al lado de los fingeres o puede ser
trasladado a la posición opuesta. Diversos modelos del apretón están disponibles dependiendo de los cuales se elige la posición del pulgar. De tal modo, el dueño puede decidir para ellos mismos de la mano que de los 14 tipos posibles del apretón quieren utilizar y en qué orden son pedidos y con software pueden programar la prótesis individualmente.
Amor propio creciente
La mano biónica hace muchas actividades diarias más fáciles. “Realmente, es a menudo las pequeñas cosas que llegan a ser más fáciles con la prótesis. Para resumir, lleva a una calidad de vida claramente mejorada,” explica a Ted Varley. Además, la mano artificial también tiene un efecto psicológico grande: “Muchos usuarios divulgan que su sensación del amor propio está aumentada con el uso de una mano bebionic con la prótesis de alta tecnología que atrae interés y la fascinación.”
En este contexto, el diseño atractivo de la prótesis también desempeña un papel importante con el uso del aluminio y del acero inoxidable dando por resultado un diseño atractivo. Además, el diseño exterior también se ha adaptado lo más posible al aspecto natural. “Nuestro acercamiento era bastante inusual en odontología con el desarrollo de la tercera generación de bebionic: Primero desarrollamos la vivienda y en seguida buscados para las soluciones tales como cómo los componentes individuales podrían ser
integrado,” acentúa Varley. Hace “cinco años, esto no habría sido posible para la pequeña mano - la tecnología no fue avanzada bastante.” También, los micromotors de la C.C. del SENIOR 1024 de la serie que fueron predestinados para este uso seguían siendo en la fase de desarrollo cuando son más escarpado dado vuelta a FAULHABER con este proyecto en 2013. Los equipos de proyecto en ambos lados entonces apresuraron el desarrollo de la prótesis de la serie y de la mano del motor al mismo tiempo. Reuniones regulares del MÁS ESCARPADO
y los equipos de desarrollo de FAULHABER ocurrieron en el Reino Unido y Suiza así como y facilitado por los electro sistemas mecánicos (el ccsme), el socio exclusivo de la distribución de FAULHABER en Gran Bretaña. Esta cooperación intensiva dio lugar a un motor con un ratio excepcional del poder-volumen para los fingeres y a anunció el actuador para el pulgar que traía esta cooperación de desarrollo extensa a una conclusión acertada.
Marcas superiores para el funcionamiento
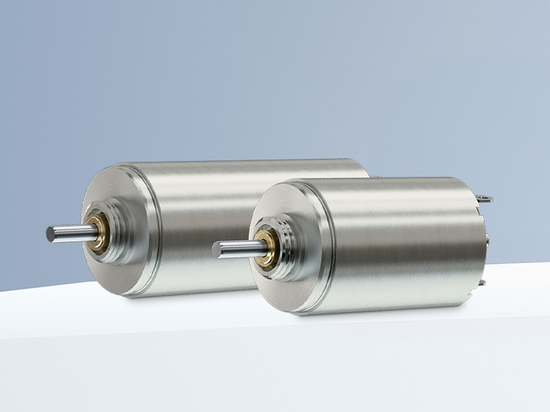
Nuevo DC-micromotor del SENIOR 1024 de la serie es auténtico el mejor de clase y del más potente para su tamaño en el mercado. Con un diámetro de 10 milímetros y de una longitud de 24 milímetros, entrega un grado del esfuerzo de torsión de la parada del mNm 4,6. Además, ofrece el esfuerzo de torsión constantemente alto a través de la gama de velocidad entera resultando de la curva plana de la velocidad/del esfuerzo de torsión. El alto rendimiento, entre otros, es hecho posible por el desarrollo de un nuevo diseño de la bobina que contenga el 60 por ciento más de cobre que su precursor y tiene
combinado con un imán de tierras extrañas potente. Para hacer el movimiento tan reservado como sea posible, la mano artificial utiliza los gearheads planetarios basados en la serie 10/1 en las versiones modificadas para requisitos particulares que no contienen ningún plástico. “Un desafío significativo era el desarrollo del sistema de impulsión linear que tuvo que ser integrado en el pulgar”, dice a Tiziano Bordonzotti, encargado de ventas en FAULHABER MINIMOTOR. Los gracias a los 4 puntos de alta precisión entran en contacto con el transporte de la filial de FAULHABER, sistemas micro de la precisión (P.M.), especialistas en transportes de la precisión muy alta y los sistemas micro, era posible hacer más corto del sistema de impulsión el perceptiblemente comparado a
competencia. Las características únicas de llevar del contacto de 4 puntos significan que incluso con una dimensión más pequeña que sistemas que llevan alternativos todavía soporta la alta carga axial requerida en este uso. El actuador completo del pulgar permanece dentro de una longitud total de menos de 49m m y puede soportar una fuerza axial de hasta 300 N.
El resultado de la colaboración excita a Ted Varley: “La pequeña mano bebionic es la prótesis myoelectric más realista de la mano en el mercado y no habría sido posible realizar este proyecto sin la colaboración estrecha del equipo de proyecto de FAULHABER.”