Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
[Proyecto compartido]
Solución de conexión multiconexión para robots industriales
Si busca una solución de conexión para robots industriales multiarticulación, este artículo le proporcionará una solución completa, que aportará comodidad y eficacia a todos. Los robots industriales y los sistemas de montaje automatizados son parte integrante de la producción industrial moderna. En un entorno de automatización industrial, los robots pueden lograr operaciones eficientes y garantizar una alta calidad estable en cada paso. Los robots se utilizan ampliamente en aplicaciones como soldadura flexible, pulverización, ensamblaje, embalaje y transporte.
Sin embargo, siempre ha habido algunas dificultades en el esquema de conexión de los robots. Los métodos tradicionales de integración de señales de pinzas y fijaciones de robots suelen añadir muchos cables de conexión de señales, lo que no favorece el mantenimiento y la sustitución posteriores. En las aplicaciones de integración flexible de varios robots, a menudo es necesario sustituir la pinza final. Si las fijaciones no pueden cambiarse rápidamente, la eficacia de las operaciones se verá afectada. Además, cómo reducir la carga que soportan los robots es un tema clave en la integración de muchos sistemas de montaje.
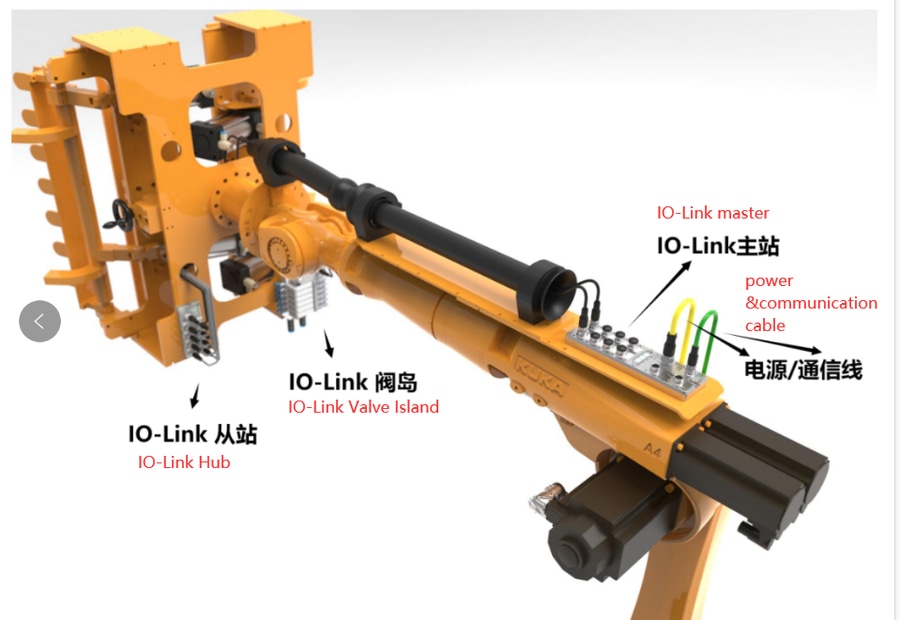
La tecnología IO-Link de Fuyansheng puede resolver eficazmente los problemas de conexión de los robots industriales multiarticulados. Esta tecnología puede simplificar la instalación y el mantenimiento de los robots, reducir el número de cables y mejorar la estabilidad y la eficiencia operativa de todo el sistema. Se cree que con la popularización y el desarrollo de la automatización industrial, la tecnología IO-Link de Fuyansheng se utilizará más ampliamente.
En vista de las dificultades anteriores, recomendamos la tecnología IO-Link de Fuyansheng, que puede resolver los problemas anteriores de un solo golpe desde los dos aspectos siguientes
Integración de la pinza del robot y posición fija de la estación principal
1. Soporte de carga del cuerpo del robot: Podemos establecer un marco fijo en la articulación del codo del robot. Esto puede lograr una conexión transitoria entre la pinza, la señal del extremo de la fijación y el extremo del controlador. Este enfoque no sólo puede reducir eficazmente el espacio necesario para instalar el robot, sino también reducir la necesidad de cables resistentes a la torsión en el paquete de tuberías. Por lo tanto, se puede reducir el número de cables y simplificar la instalación.
2. Integración de señales en el extremo de la pinza y la fijación: En cuanto al método de conexión para integrar las señales en el extremo de la base del robot en el armario de control, utilizamos una combinación de diseños compactos como M12, base de brida de 7/8", conectores de alta resistencia y placas de cableado. componentes, que pueden adaptarse a la transmisión de energía, datos y señales, y también pueden hacer frente a condiciones ambientales adversas. En el lado del armario de control, solemos utilizar cables de conexión del panel frontal, que pueden lograr una conexión rápida y facilitar el aislamiento y el mantenimiento.





