Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
El interior de un actuador lineal eléctrico
{{{sourceTextContent.subTitle}}}
Componentes principales, entrega de potencia y recorrido de la carrera.
{{{sourceTextContent.description}}}
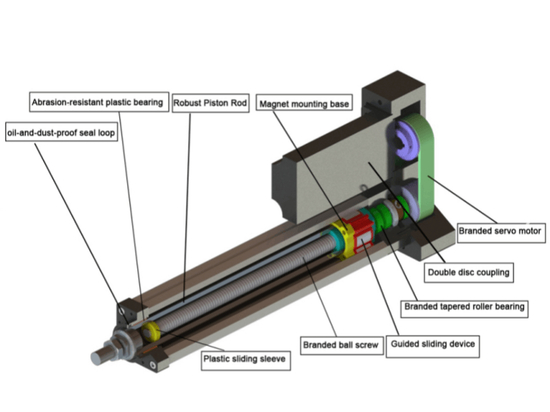
PRINCIPALES COMPONENTES
Este actuador en particular es alimentado por un motor de 12VDC con escobillas. Viene con los interruptores de fin de carrera incorporados para evitar la sobreextensión y la retracción, una característica estándar para nuestros productos. Otros componentes principales serán la caja de engranajes, el husillo y la tuerca de accionamiento acme, que también acciona los interruptores de límite una vez que alcanza una determinada posición. La imagen de arriba muestra el PA-14 en la mitad de su recorrido, lo que significa que puede retraerse o extenderse hasta alcanzar los interruptores de límite.
ENTREGA DE POTENCIA
Un actuador lineal, por definición, es un objeto que moverá objetos en una dirección lineal. El movimiento de rotación es generado primero por el motor eléctrico, a menudo en milésimas de revoluciones por minuto.
Este movimiento de rotación de alta velocidad es entonces reducido por la caja de engranajes para aumentar el par que se utilizará para girar el husillo. Las cajas de engranajes suelen tener una relación de reducción del tipo "100:1", lo que significa que por cada 100 rotaciones del motor, habrá 1 rotación en el engranaje final de la caja de engranajes que está conectado al husillo.
El husillo gira entonces, lo que resulta en un movimiento lineal de la tuerca de accionamiento acme. Esto es muy similar a introducir un tornillo en un trozo de madera. Sin embargo, en lugar de que el tornillo se mueva hacia la pieza de madera fija, es el tornillo el que se fija y, por tanto, la madera se moverá hacia el tornillo o se alejará de él. Los tornillos de plomo vienen con una especificación TPI, que significa vueltas por pulgada. Por ejemplo, un TPI de 15 significará que por cada 15 vueltas del husillo, la tuerca de conexión se moverá una pulgada.
La velocidad del motor, la reducción del engranaje y el TPI del husillo determinan la velocidad final del actuador lineal. Nuestros actuadores tienen varias opciones de fuerza por modelo. Estos modelos suelen tener el mismo motor, pero la reducción del engranaje y el TPI cambian. La regla general es que al reducir la velocidad, la fuerza aumenta, y viceversa.
RECORRIDO DE LA CARRERA
Una de las adiciones más convenientes a un actuador lineal son los interruptores de fin de carrera incorporados. Esencialmente, esto evita que el actuador alcance los límites físicos de movimiento de la carcasa, lo que probablemente hará que el motor se queme. También permite un movimiento de parada más suave una vez que se alcanza el final del recorrido.
El sistema empleado para estos finales de carrera es muy sencillo y robusto. La electricidad de su fuente de alimentación va esencialmente del conector de entrada del actuador al motor, a los interruptores de límite antes de completar el circuito de vuelta al conector como se muestra en el diagrama de abajo.
Los interruptores de límite interrumpen el recorrido de la electricidad una vez que es tocada por la tuerca de accionamiento. Ahora, debido al diodo unidireccional en cada interruptor de límite, la electricidad sólo puede fluir en una dirección. Por ejemplo, la dirección de la electricidad requerida para extender el actuador será detenida por el interruptor de límite extendido y su diodo.
Sin embargo, el diodo permitirá la dirección opuesta de la electricidad que se requerirá para retraer el actuador. Una vez que el tornillo de accionamiento se ha retraído y ya no está tocando el interruptor de límite extendido, entonces la electricidad pasa a través del interruptor de límite de nuevo permitiendo el movimiento en ambas direcciones.