Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
Escenarios de movimiento: Aplicaciones de recogida y colocación
{{{sourceTextContent.subTitle}}}
El diseño de una automatización completa para aplicaciones de recogida y colocación de alta velocidad es una de las tareas más difíciles a las que se enfrentan los ingenieros de movimiento
{{{sourceTextContent.description}}}
A medida que los sistemas robóticos se vuelven más complejos y las tasas de producción aumentan, los diseñadores de sistemas deben mantenerse al día con las últimas tecnologías o arriesgarse a especificar un diseño menos que óptimo. Repasemos algunas de las últimas tecnologías y componentes disponibles, y veamos de cerca dónde se utilizan.
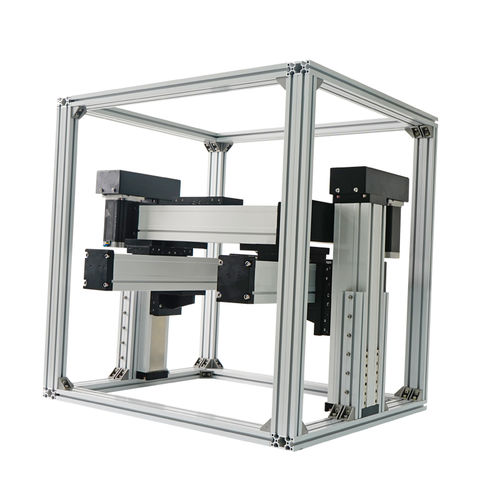
Los brazos robóticos se adaptan a los diseños compactos
Los brazos robóticos industriales no suelen ser conocidos por su ligereza. Por el contrario, la mayoría de ellos tienen construcciones sustanciales que deben soportar herramientas pesadas en el extremo del brazo. A pesar de las ventajas de un diseño robusto, estos brazos robóticos son demasiado pesados y voluminosos para aplicaciones delicadas. Para hacer que los brazos más ágiles sean más apropiados para tareas ligeras, los ingenieros de igus Inc. que trabajan en Colonia, Alemania, se propusieron desarrollar una articulación multieje que permitiera a las cargas pequeñas girar alrededor de un brazo. La nueva articulación es muy adecuada para aplicaciones delicadas de recogida y colocación en las que la fuerza de agarre puede ajustarse según sea necesario.
La flexibilidad y la ligereza son los parámetros clave del diseño de la nueva articulación, que consiste en controles de plástico y cable. En resumen, los cables se mueven desde la articulación del hombro del brazo mediante servomotores compactos de corriente continua sin escobillas de FAULHABER, lo que evita la inercia en el brazo, facilita el movimiento dinámico y minimiza la huella del diseño.
Los ingenieros se basaron en gran medida en la articulación del codo humano, por lo que dos DOF (rotación y giro) se combinan en una sola articulación. Al igual que en un brazo humano, la parte más débil del brazo robótico no son los huesos (el tubo del cuerpo del brazo robótico) ni los músculos (el motor de accionamiento), sino los tendones, que transfieren la energía. En este caso, los cables de control de alta tensión están hechos de un material de polietileno UHMW-PE superresistente con una resistencia a la tracción de 3.000 a 4.000 N/mm2. Más allá de las funciones tradicionales de los brazos robóticos, como las aplicaciones de recogida y colocación, la articulación también es adecuada para accesorios especiales de cámaras, sensores u otras herramientas que requieran una construcción ligera. Cada articulación lleva incorporado un sensor magnético de posición angular para lograr una gran precisión.
Los servomotores de conmutación electrónica presentan una baja masa móvil adecuada para su uso dinámico: La tensión de funcionamiento de 24 Vdc está diseñada para la alimentación por batería, crucial para su uso en aplicaciones móviles, mientras que el par motor de 97 mNm aumenta los reductores planetarios que cumplen con el diámetro hasta los valores necesarios para el funcionamiento del brazo. Además, estos accionamientos sin escobillas no tienen ningún componente de desgaste aparte del rodamiento del rotor, lo que garantiza una vida útil de decenas de miles de horas.
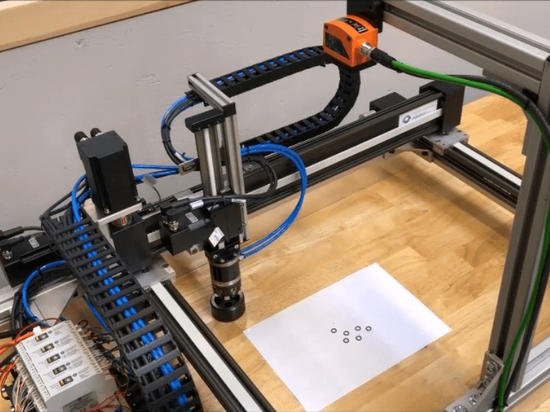
El sistema de movimiento lineal acelera la automatización del laboratorio
Más allá de las operaciones tradicionales de envasado y montaje, el sistema pick-and-place también está proliferando en la automatización de laboratorios de alta velocidad. Imagínese la manipulación de millones de muestras de bacterias cada día y tendrá una idea de lo que se espera de los laboratorios de biotecnología actuales. En una instalación, un avanzado sistema de movimiento lineal permite a un robot de laboratorio de biotecnología llamado RoToR fijar conjuntos de células a una velocidad récord de más de 200.000 muestras por hora. RoToR procede de Singer Instruments, de Somerset (Reino Unido), y se utiliza como sistema de automatización de mesa para la investigación genética, genómica y oncológica. Uno de estos robots suele dar servicio a varios laboratorios diferentes, en los que los científicos reservan breves espacios de tiempo para replicar, aparear, volver a montar y hacer copias de seguridad de bibliotecas de bacterias y levaduras.
Un controlador en tiempo real maneja los tres ejes de movimiento que coordinan los movimientos de fijación punto a punto del robot, así como un eje de manipulación de muestras, y también interactúa con la interfaz gráfica de usuario del robot. Además, el controlador también gestiona todos los canales de E/S.
Además del controlador, Baldor también suministró un servomotor lineal y un accionamiento y tres módulos integrados de motor paso a paso y accionamiento. El robot realiza transferencias punto a punto desde las placas de origen a las de destino a lo largo de un eje de servomotor lineal que recorre la anchura de la máquina. Este eje soporta un cabezal de motor paso a paso de dos ejes que controla la acción de clavado. De hecho, el movimiento combinado X-Y-Z puede incluso agitar las muestras mediante un movimiento helicoidal complejo. El eje separado del motor paso a paso controla el mecanismo de carga de las cabezas de alfiler. Las pinzas y los rotadores neumáticos controlan otros movimientos de la máquina, como la recogida y la eliminación de los cabezales al principio y al final de las operaciones.
En un principio, Singer pretendía utilizar un accionamiento neumático para el eje transversal principal, pero este diseño no podía proporcionar la resolución de posicionamiento o la velocidad deseadas, y era demasiado ruidoso para un entorno de laboratorio. Fue entonces cuando los ingenieros empezaron a considerar los motores lineales. Baldor creó un servomotor lineal sin escobillas a medida con modificaciones mecánicas en la pista lineal, permitiendo que se apoyara sólo en sus extremos, en lugar de a lo largo de su longitud - por lo que la horquilla del motor actúa como un pórtico del eje X que lleva los ejes Y y Z. Por último, el diseño del imán del motor lineal reduce al mínimo el engranaje para permitir un movimiento suave.