Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
Sistemas de pórtico: Trabajar fuera de los límites
{{{sourceTextContent.subTitle}}}
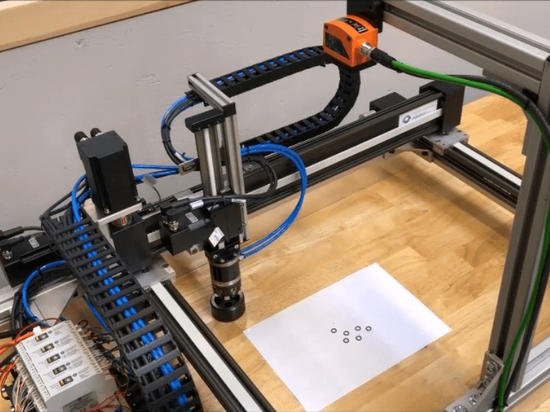
Hecho: los robots de diseño cartesiano suelen producir la mejor precisión.
{{{sourceTextContent.description}}}
Aplicación / Industria:
Embalaje, producción, paletización, pick and place, automatización.
El reto:
Los envolventes de trabajo irregulares de los brazos articulados tradicionales pueden requerir el rediseño de los espacios de trabajo existentes. Puede que los robots SCARA y de brazo articulado sean los más conocidos en el mercado actual, pero hay que recurrir a los robots de pórtico para realizar los trabajos grandes en el menor espacio posible. Los robots de pórtico, también llamados robots cartesianos, son casi omnipresentes en la automatización, pero, por razones que escapan al alcance de este artículo, no se les puede considerar rápidamente como robots serios. Debido a su diseño sencillo, su bajo coste y su escalabilidad, así como a la infinidad de soluciones de motor y software de control, esto está cambiando.
Ventajas de los robots de pórtico:
3+ ejes de movimiento de casi cualquier longitud
Escalable
La caja de cambios y el motor se pueden dimensionar según el rango de movimiento y las velocidades
Adecuado para cargas ligeras y pesadas / colgantes
Flexible y eficiente gracias a la escalabilidad de los ejes lineales
Económico
Desventajas de los robots de pórtico:
No puede variar el alcance dentro o alrededor de los obstáculos
Los raíles de las correas lineales no son fáciles de sellar contra el entorno
No es autónomo: requiere un soporte o un marco u otro tipo de montaje
Ventajas del sistema de pórtico:
Los robots de pórtico pueden utilizar un sobre de trabajo cúbico completo del 96% de su espacio y tamaño. Un robot cartesiano tiene tres ejes. Al igual que su homónimo y sus primos gigantes más reconocibles, la grúa de pórtico, suelen estar suspendidos de una viga de eje X o X/Y en una estructura rígida. Las coordenadas en los tres ejes suelen definirse como X, Y y Z. Cada eje está dispuesto en ángulo recto para permitir tres grados de movimiento. Los pórticos se caracterizan además por el apoyo en cualquiera de sus extremos o por la adición de un segundo miembro. A diferencia de los robots de brazo, los pórticos pueden escalarse fácilmente a proporciones mayores en los tres ejes. Los robots de pórtico son especialmente adecuados para aplicaciones en las que los requisitos de orientación adicional son mínimos o en las que las piezas pueden ponerse en escena antes de que el robot las recoja.
Tanto los robots cartesianos como los de pórtico tienen un área de trabajo rectangular o cúbica, a diferencia de los robots articulados que, al igual que las articulaciones de un brazo humano, tienen límites para cada movimiento y un ámbito de movimiento arqueado específico. Sus especificaciones se muestran en forma de grados de movimiento con grandes arcos de barrido con parcelas de grados de movimiento positivos y negativos que giran en torno al centro de su base y al rodamiento de cada eje. Es curioso observar que el propio espacio de trabajo a menudo tiene que adaptarse a estos envolventes de trabajo inusuales, en lugar de que el robot se adapte al espacio de trabajo.
Debido a su estructura rígida y ligera, los robots cartesianos/de pórtico son muy precisos y repetibles. Debido a su sencilla estructura, los robots de pórtico son intuitivos de programar y fáciles de visualizar cuando se evalúa una nueva automatización. La mayoría de los robots de pórtico son configurables. Desde una gran cantidad de opciones de motores y cajas de engranajes hasta componentes y materiales, estos robots están preparados para afrontar los retos de los entornos húmedos y sucios.
El diseño relativamente sencillo del robot de coordenadas cartesianas y su fácil manejo lo hacen muy deseable en la fabricación. Dado que los ejes individuales pueden sustituirse fácilmente, el tiempo de inactividad se reduce y los costes de mantenimiento se mantienen al mínimo. Además, todo el sistema puede desmontarse en sus componentes para utilizarlo en múltiples aplicaciones de un solo eje. Y lo que es más importante, los sistemas de robots de coordenadas cartesianas son baratos en comparación con otros robots más complejos.
Aplicaciones de pórtico:
Los robots de pórtico tienen todos sus ejes situados por encima del área de trabajo, lo que los hace ideales para los procesos de trabajo en altura. Los robots de pórtico pueden utilizarse para sostener y posicionar una variedad de efectores finales como los utilizados en: Ensamblaje de placas de PC, dispensación, pulverización, manipulación de materiales, paletización, recogida y colocación, chorro de agua, soldadura de placas, soldadura por fricción, ensamblaje, embalaje, unitización, clasificación, escaneado, carga/descarga de bandejas, posicionamiento de cámaras. inspección, corte de vidrio, trazado de impresión, corte por láser, cuchillas voladoras, fijación y atornillado.
Se ha dicho que el pórtico es el verdadero caballo de batalla de la industria moderna. Piénselo... se han empaquetado y vendido millones de robots de pórtico en máquinas "llave en mano", como las utilizadas para el montaje de componentes electrónicos y los sistemas robóticos de recogida y colocación por sí solos. Incluso hoy en día, los pórticos lineales X-Y-Z son el pilar de las industrias de medición de coordenadas de las máquinas herramienta debido a su precisión y rigidez. Este tipo de robot es especialmente adecuado para aplicaciones en las que los requisitos de orientación adicional son mínimos o en las que o las piezas pueden ponerse en escena antes de que el robot las recoja.
El robot de pórtico, que a menudo se pasa por alto, es el pilar de la industria de la automatización moderna y debería considerarse siempre para una nueva automatización debido a su flexibilidad, eficacia y facilidad de implementación.