Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
¿Qué son los pórticos robotizados?
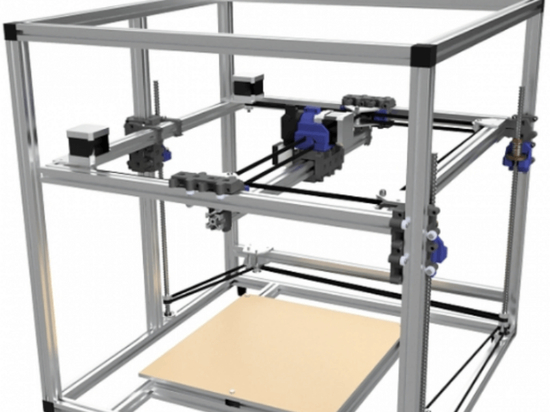
Componentes del sistema de posicionamiento XYZ.
Los pórticos robotizados son potentes herramientas de la fabricación y la automatización modernas, que ofrecen mayor precisión, flexibilidad y eficacia en una amplia gama de aplicaciones.
Introducción
Un pórtico robotizado es un robot industrial con un brazo robótico montado en un sistema o bastidor de raíles aéreos. La estructura del pórtico se compone de una serie de vigas o puntales que proporcionan al robot estabilidad y precisión para moverse a lo largo de los ejes X, Y y Z. Los robots de pórtico se utilizan habitualmente en aplicaciones en las que es necesario elevar y desplazar cargas pesadas en grandes áreas de trabajo. Los robots pueden configurarse para funcionar en diversos entornos, como salas blancas, entornos peligrosos y otras aplicaciones especializadas.
Componentes del robot pórtico
Los sistemas robóticos de pórtico constan de varios componentes que trabajan juntos para lograr movimientos precisos y exactos. Estos son los principales componentes de un robot pórtico:
Estructura del pórtico
La estructura de pórtico es el marco que soporta el brazo del robot y el módulo efector final. Consiste en dos o más vigas paralelas que se mueven a lo largo de los ejes X e Y y una columna vertical que se mueve a lo largo del eje Z. La estructura debe ser rígida y estable para garantizar la precisión y la repetibilidad de los movimientos del robot.
La estructura del pórtico puede estar hecha de diferentes materiales, como aluminio, acero y fibra de carbono, en función de los requisitos de la aplicación. El material utilizado debe ser lo suficientemente fuerte como para soportar el peso del brazo del robot y el efector final, al tiempo que debe ser ligero para reducir el peso total del pórtico.
Brazo robótico
El brazo robótico forma parte del pórtico que sujeta el efector final y se mueve a lo largo de los ejes X, Y y Z. El diseño y las especificaciones del brazo robótico dependen de los requisitos de la aplicación, como el alcance, la capacidad de carga útil y la velocidad.
El brazo robótico puede equiparse con distintos tipos de efectores finales, como pinzas, ventosas y pistolas de soldadura, para realizar tareas específicas.
Efector final
El efector final es la herramienta o dispositivo que se acopla al brazo robótico para realizar una tarea específica. El efector final puede ser una pinza, una ventosa, una pistola de soldadura, una herramienta de corte o cualquier otro dispositivo que pueda manipular la pieza o el material que se está procesando.
El efector final debe diseñarse para adaptarse a los requisitos de la aplicación, como la forma y el tamaño de la pieza, el peso y el material que se procesa. El diseño del efector final también puede influir en la precisión general y la repetibilidad de los movimientos del robot.
Sistema de accionamiento
El sistema de accionamiento consta de motores y actuadores que controlan el movimiento de la estructura del pórtico y el brazo del robot. En función de los requisitos de la aplicación, el sistema de accionamiento puede ser hidráulico, neumático o eléctrico.
Las especificaciones del sistema de accionamiento dependen de los requisitos de la aplicación, como la velocidad, el par y la precisión. El sistema de accionamiento también debe estar diseñado para trabajar con el sistema de control para lograr movimientos exactos y precisos.
Sistema de control
El sistema de control es el cerebro del pórtico robótico, responsable de controlar el movimiento de la estructura del pórtico y del brazo robótico.
El software del sistema de control debe programarse para adaptarse a los requisitos de la aplicación, como el perfil de movimiento, los índices de aceleración y deceleración y la planificación de la trayectoria. El sistema de control también debe integrarse con otros sensores y equipos para conseguir movimientos exactos y precisos.
En general, el diseño y las especificaciones de cada componente de un pórtico robótico deben estudiarse cuidadosamente para conseguir movimientos exactos y precisos que garanticen la fiabilidad y eficacia del pórtico a la hora de realizar la tarea prevista.