Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
Tres robots típicos de coordenadas cartesianas
{{{sourceTextContent.subTitle}}}
Robot lineal, robot de pórtico y robot de celosía.
{{{sourceTextContent.description}}}
El robot cartesiano o robot lineal puede denominarse colectivamente robot industrial, en el que tres ejes de control (eje XYZ) se mueven a lo largo de una línea recta en lugar de girar. Al mismo tiempo, sus ejes de control (eje XYZ) están en un ángulo de 90° entre sí, y las tres articulaciones deslizantes movimiento lineal de ida y vuelta. Por lo tanto, los robots cartesianos a veces se denominan robots lineales.
Robot lineal
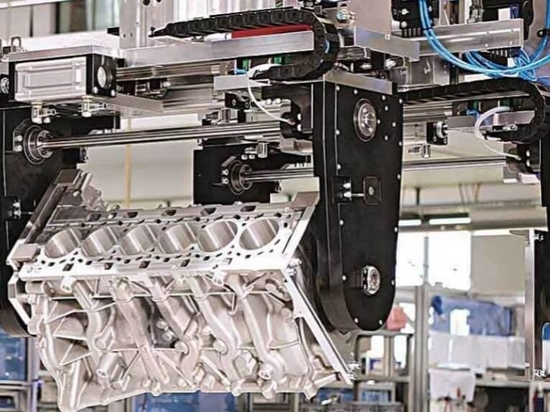
Debido a que las tres articulaciones deslizantes del robot cartesiano pueden moverse linealmente hacia arriba y hacia abajo, hacia la izquierda y hacia la derecha, hacia delante y hacia atrás, se denomina robot lineal. Las soluciones de brazo de control de robot cartesiano se utilizan habitualmente en mecanizado CNC, impresión 3D, fresadoras y plotters. La máquina de recogida y colocación también puede funcionar con un robot lineal de coordenadas cartesianas. Un tipo de robot cartesiano es aquel en el que ambos extremos se apoyan horizontalmente.
Robot de pórtico
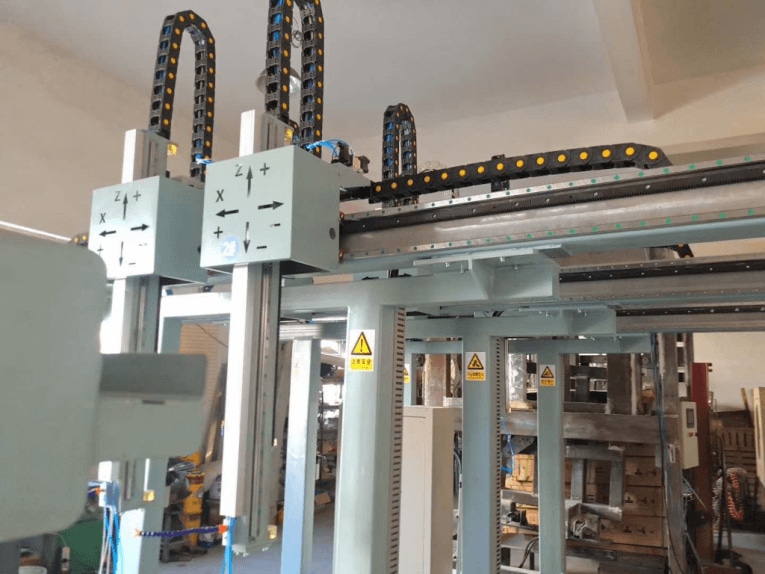
El robot de pórtico o sistema de pórtico es uno de los robots cartesianos. Necesita apoyarse en ambos extremos en la dirección horizontal en la función de uso, por lo que tiene forma de pórtico, por lo que se denomina robot de pórtico. El pórtico se apoya en ambos extremos.
Robot cartesiano
Coordenadas cartesianas es un término general para el sistema de coordenadas rectangulares y el sistema de coordenadas oblicuas. Si las unidades de medida en los dos ejes numéricos son iguales, se denomina sistema de coordenadas cartesianas. Un sistema de coordenadas cartesianas en el que dos ejes numéricos son perpendiculares entre sí se denomina sistema de coordenadas cartesianas rectangulares; en caso contrario, se denomina sistema de coordenadas cartesianas oblicuas.
Un robot cartesiano es un robot de coordenadas cartesianas o un robot de pórtico cartesiano XY
El robot de coordenadas cartesianas es un manipulador multipropósito que puede realizar control automático, reprogramación y construir relaciones cartesianas espaciales con grados de libertad. También se conoce como gran robot de coordenadas cartesianas, multigrado de libertad y construir relaciones cartesianas espaciales con grados de libertad. También se conoce como robot experto o robot de pórtico. Su comportamiento de trabajo es principalmente a través de completar el movimiento lineal a lo largo de los ejes X, y y Z.
Robot de celosía
El robot de celosía es un tipo de dispositivo industrial totalmente automático basado en el sistema de coordenadas X, Y y Z en ángulo recto, que puede ajustar la posición de la pieza de trabajo o realizar el corte de la trayectoria de la pieza de trabajo. De hecho, el nombre del robot de celosía es robot de pórtico, porque el pórtico a menudo se llama pórtico, y el pórtico también se puede llamar celosía, por lo que existe el dicho de robot de celosía.
En resumen, los principios de funcionamiento del robot de celosía, el robot de pórtico y el robot lineal son los mismos. Todos ellos son un tipo de robot cartesiano para diferentes aplicaciones.