Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Novedades de la industria
{{{sourceTextContent.title}}}
Motor paso a paso de bucle abierto frente a sistemas de motor paso a paso de bucle cerrado
{{{sourceTextContent.subTitle}}}
PREGUNTAS Y RESPUESTAS
{{{sourceTextContent.description}}}
Los motores paso a paso son uno de los pilares de la industria del control del movimiento. Analizaremos las diferencias entre los sistemas de bucle abierto y los de bucle cerrado, y explicaremos los últimos avances que hacen que los sistemas de motores paso a paso sean más rápidos, silenciosos y eficientes energéticamente que nunca.
Los sistemas de motor paso a paso han recorrido un largo camino desde los primeros días de los accionamientos de tensión y el paso a paso completo. Primero llegaron los accionamientos PWM y el micropaso, y después los procesadores digitales de señales (DSP) y los algoritmos antirresonancia. Ahora, la nueva tecnología de paso a paso de bucle cerrado garantiza que los motores paso a paso sigan siendo una piedra angular de la industria del control de movimiento en los próximos años.
Independientemente de que el movimiento sea lineal o giratorio, el par y la eficiencia son las dos consideraciones principales que determinan qué motor y qué sistemas de accionamiento son los más adecuados. Esto se aplica tanto si la aplicación final es un sistema de montaje automatizado, una máquina de manipulación de materiales, una impresora 3D, un posicionador cartesiano, una bomba peristáltica o una de las innumerables aplicaciones en las que los motores paso a paso son una tecnología preferida.
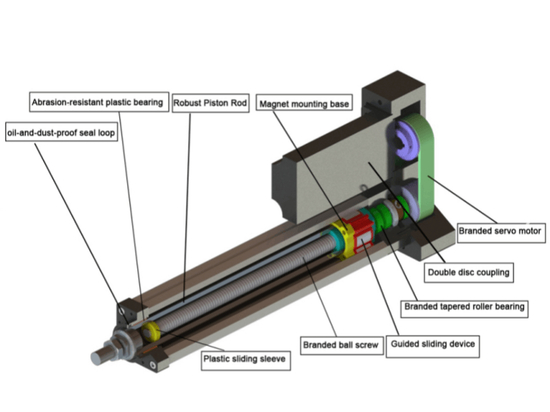
El último avance en sistemas paso a paso es la aplicación de dispositivos de realimentación de alta resolución y bajo coste y DSP avanzados para cerrar el bucle del movimiento de los motores paso a paso. Estos controles aumentan el rendimiento de los motores paso a paso en bucle cerrado para superar a los sistemas de bucle abierto. Como veremos, uno de estos sistemas de bucle cerrado se implementa en un diseño de motor integrado que incluye un dispositivo de realimentación, placas de controladores y drivers, electrónica de alimentación, comunicación y E/S, y conectores de sistema en el lateral y la parte trasera del motor.
Sistemas paso a paso de bucle abierto frente a bucle cerrado
En primer lugar, veamos cómo se comparan los sistemas paso a paso de bucle cerrado de alto rendimiento con los sistemas paso a paso de bucle abierto tradicionales en términos de par y eficiencia.
El rendimiento de los sistemas de bucle cerrado es superior al de los sistemas de bucle abierto, como demuestran los resultados de las pruebas de laboratorio que comparan la aceleración (par), la eficiencia (consumo de energía), el error de posición (precisión), la generación de calor y los niveles de ruido de ambos sistemas. Basta con considerar la relación entre par y aceleración. Las curvas de par-velocidad muestran los rangos de par máximo y continuo de un sistema paso a paso de bucle cerrado junto con el rango de par utilizable de un sistema paso a paso de bucle abierto. Muy a menudo, el par en el mundo real se traduce en aceleración, de modo que los motores con mayor par pueden acelerar más rápidamente una carga determinada.
Para probar esta diferencia en el rendimiento de par en el laboratorio, los sistemas de motor paso a paso de bucle abierto y bucle cerrado de igual tamaño reciben cargas inerciales idénticas. La programación ordena a los dos sistemas que realicen perfiles de movimiento idénticos, salvo que la tasa de aceleración y la velocidad máxima se incrementan lentamente en cada sistema hasta que cometen errores de posicionamiento.
Digamos que el sistema de bucle abierto obtiene una tasa de aceleración máxima de 1.000 rev/seg2 y una velocidad máxima de 10 rev/seg (600 rpm). Esta velocidad máxima de 10 rev/s se correlaciona con el final de la parte plana de la curva par-velocidad. El sistema de bucle cerrado (debido a su mayor capacidad de producción de par) obtiene una tasa de aceleración máxima de 2.000 rev/seg2 y una velocidad máxima de 20 rev/seg (1.200 rpm). Esto supone el doble de rendimiento que el sistema de bucle abierto y reduce el tiempo de movimiento casi a la mitad: de 110 mseg a 60 mseg.
Para aplicaciones que requieren un alto rendimiento (como la indexación, el posicionamiento de guías de bordes y los sistemas pick-and-place), el sistema de bucle cerrado ofrece una clara ventaja de rendimiento.
Eficacia en bucle abierto frente a bucle cerrado
Para medir la eficacia relativa de un sistema de bucle abierto frente a uno de bucle cerrado, supongamos que repetimos la misma prueba con los mismos dos motores de igual tamaño. Esta vez hacemos que los motores de bucle cerrado y de bucle abierto funcionen uno al lado del otro con las mismas cargas inerciales, pero ejecutamos una programación que mantiene los perfiles de movimiento constantes e iguales, de modo que ambos sistemas realizan la misma cantidad de trabajo.
Mientras los dos motores indexan repetidamente el mismo perfil de movimiento, se mide el consumo de corriente de la fuente de alimentación de CC que alimenta a los dos sistemas y se calcula el consumo de energía. Como puede verse en los gráficos de valores, el consumo medio del sistema de paso a paso de bucle abierto es de 43,8 vatios, mientras que el del sistema de bucle cerrado es sólo un tercio, 14,2 vatios de media. Esta gran diferencia en el consumo de energía demuestra claramente la mayor eficiencia del sistema de bucle cerrado. Cualquier usuario que desee aumentar la eficiencia de su sistema paso a paso de bucle abierto puede plantearse ahora una sencilla actualización a un sistema de bucle cerrado y esperar un consumo significativamente menor.
Cómo abordar el calentamiento del motor
Una extensión natural de las pruebas de consumo de energía es la investigación del calentamiento del motor. Los sistemas paso a paso de bucle abierto son muy sencillos. Basta con configurar el accionamiento para la intensidad nominal del motor y éste hará todo lo posible por suministrar dicha intensidad al motor en todo momento, independientemente de que se necesite o no el par resultante. Esto a menudo provoca la generación de calor en lugar de energía para la función de la aplicación, y es la razón por la que los sistemas paso a paso de bucle abierto suelen calentarse más que sus homólogos de bucle cerrado. También significa que los diseñadores de máquinas deben tomar medidas adicionales para hacer frente a este calor, a menudo incluyendo protecciones especiales alrededor de los motores paso a paso que funcionarán cerca de operadores humanos, o instalando sistemas de refrigeración adicionales, como ventiladores.
Considere los resultados de una prueba de calentamiento del motor realizada en un laboratorio utilizando los mismos sistemas de bucle abierto y bucle cerrado anteriores. En esta prueba, los dos sistemas vuelven a producir la misma cantidad de trabajo impulsando las mismas cargas inerciales, y se les deja funcionar hasta que alcanzan el equilibrio térmico. El sistema de bucle abierto alcanza una temperatura de carcasa de 76,0 °C, mientras que el sistema de bucle cerrado alcanza el equilibrio térmico a una temperatura de carcasa de sólo 36,9 °C, menos de la mitad que el sistema de bucle abierto. Esta importante reducción del calentamiento del motor puede suponer menores costes de componentes para los fabricantes de maquinaria, ya que pueden prescindir de subsistemas adicionales de protección y refrigeración.
Se acabaron los motores ruidosos
Otra queja habitual sobre los sistemas paso a paso de bucle abierto es que hacen bastante ruido. En determinados entornos, como laboratorios, hospitales y oficinas, este ruido puede suponer un verdadero problema para los diseñadores de máquinas.
El ruido que emiten los motores paso a paso se debe a la alta frecuencia eléctrica y a los rápidos cambios de flujo en los dientes del estator, y a que los sistemas de bucle abierto funcionan a plena corriente nominal independientemente de la carga. En cambio, los sistemas paso a paso de bucle cerrado suministran al motor la corriente justa para controlar la carga, lo que produce mucho menos ruido audible.
Para obtener los resultados de las pruebas que se muestran en el gráfico de ruido acústico que acompaña a este artículo, se mide el ruido acústico de cada sistema en una cámara insonorizada. El sistema de bucle cerrado es mucho más silencioso que la opción de bucle abierto a velocidades de 0 a 20 rev/seg. Este rango de velocidad coincide con el rango de velocidad real de las aplicaciones en las que se utilizan con más frecuencia los sistemas de motor paso a paso, lo que significa que la gran mayoría de las aplicaciones de motor paso a paso podrían beneficiarse de la reducción del ruido del motor si se cambiara a sistemas de bucle cerrado.
Mayor precisión del motor para eliminar errores de posición
Los sistemas de motor paso a paso de bucle abierto son muy apreciados por su capacidad para posicionar cargas con precisión sin un mecanismo de realimentación o un sistema de control de bucle cerrado, pero sólo si el sistema de bucle abierto tiene un margen de par suficiente para que no se produzcan errores de posición durante el funcionamiento normal. Para mejorar la precisión y conseguir un diseño de sistema más robusto, el cierre del bucle de servoposición en torno a la realimentación del encóder de alta resolución permite a los sistemas de bucle cerrado compensar automáticamente los aumentos de la demanda de par que, de otro modo, provocarían errores de posición en los sistemas de bucle abierto. Esto mejora enormemente la precisión general del sistema, sobre todo en aplicaciones muy dinámicas, como los sistemas pick-and-place y las impresoras 3D, donde se necesitan movimientos cortos y rápidos y cambios de dirección frecuentes.
Actualización de sistemas paso a paso existentes
De los componentes de un sistema de motor paso a paso integrado, el motor, el amplificador de potencia y los costes de comunicación no suelen aumentar al pasar de lazo abierto a lazo cerrado. La electrónica de control puede requerir un poco más de potencia de procesamiento central o memoria para servocontrolar el motor, pero esto no suele repercutir en los precios de catálogo. Gran parte de la diferencia de coste entre los sistemas paso a paso de bucle abierto y de bucle cerrado radica en la incorporación de un dispositivo de realimentación de alta resolución, pero los avances en la fabricación han hecho que estos dispositivos sean cada vez más asequibles. En la actualidad, los sistemas paso a paso de bucle cerrado mantienen las ventajas económicas de los sistemas paso a paso de bucle abierto frente a otros tipos de sistemas de posicionamiento, como los servos tradicionales, pero con un rendimiento muy superior en casi todos los aspectos. Normalmente, el ahorro de energía y el mayor rendimiento de un sistema de bucle cerrado amortizan rápidamente el ligero aumento del coste del dispositivo de realimentación.
Además de un aumento mínimo del coste, la actualización de un sistema paso a paso de bucle abierto a un sistema de bucle cerrado se simplifica con las ofertas de tamaño de bastidor NEMA. Un motor paso a paso NEMA 23 de bucle cerrado tiene el mismo tamaño de bastidor, diámetro piloto, círculo de orificios para pernos y diámetro de orificios para pernos que un motor paso a paso NEMA 23 de bucle abierto, por lo que los soportes de montaje siguen siendo los mismos. El mayor par disponible del sistema de bucle cerrado significa que el diámetro del eje del motor paso a paso de bucle cerrado puede ser mayor, pero esto normalmente se puede resolver con bastante facilidad con un simple cambio del acoplamiento del eje.