Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Novedades de la industria
{{{sourceTextContent.title}}}
Componentes de la clasificación y de la base del robot coordinado cartesiano
{{{sourceTextContent.subTitle}}}
colocación, impulsión, control y sistema terminal
{{{sourceTextContent.description}}}
Los coordenadas rectangulares de la clasificación del robot:
1, según el uso de puntos: robots de soldadura, robots que empalietan, robots del pegamento (dispensación), robots de la detección (supervisión), clasificando los robots (de la clasificación), los robots de montaje, los robots del EOD, los robots médicos, los robots especiales, el etc.
2, según los puntos estructurales de la forma: el robot montado en la pared (del voladizo), el robot del pórtico, el robot al revés y el otro robot rectangular típico.
3, según grados de libertad: robots del dos-coordenada, robots del tres-coordenada, robots del cuatro-coordenada, robots del cinco-coordenada, robots del seis-coordenada.
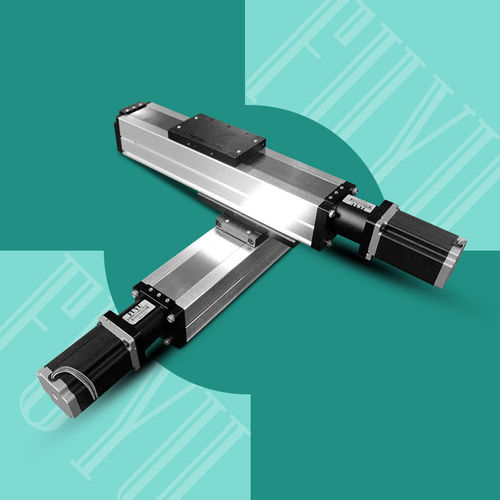
Componentes coordinados cartesianos de la base del robot - la unidad de colocación linear para reducir el coste de robots cartesianos, acortar el ciclo de desarrollo de productos, la confiabilidad de producto del aumento, mejorar funcionamiento de producto, en muchos países en Europa y la América ha sido el robot coordinado rectangular modular, el linear colocando la unidad (sistema) es el producto más típico de la modularización.
Una unidad de colocación completa (sistema) consiste en varias piezas
1, colocando perfil del cuerpo: Pues la pieza de montaje de la ayuda de la pista, este perfil es diferente del perfil general del marco, requiere una rectitud muy alta, llanura.
2, pista del movimiento: instalado en el perfil de colocación del cuerpo, apoye directamente el movimiento del resbalador. Un cuerpo de colocación que el perfil (sistema) se puede instalar con una pista del movimiento, o él se puede instalar con una pluralidad de pistas del movimiento. Las características y la cantidad de la pista directamente afectar a las características mecánicas de la unidad de colocación (sistema). Los tipos de pistas que compongan el sistema de colocación son muy comunes. Hay rodamientos lineares y transportes de acero cilíndricos rectos.
3, resbalador del movimiento: consiste en la pletina de la carga, llevando el marco, grupo del rodillo (grupo) de la bola, cepillo del polvo, cavidad de la lubricación, cubierta de lacre. Los resbaladores del movimiento son juntados con los carriles por los rodillos o las bolas. Alcance la dirección de deportes.
4, componentes de la transmisión: Los componentes generales de la transmisión son correa síncrona, correa dentada, tornillo/tornillo de la bola, estante, motor linear y así sucesivamente.
7, llevando y llevando el asiento: utilizado para instalar el elemento de la transmisión y el elemento de impulsión.
Elementos de impulsión coordinados cartesianos del robot - el sistema de impulsión del motor la unidad de colocación linear (sistema) puede alcanzar el movimiento exacto que coloca, que es determinado por el sistema de impulsión del motor.
Los sistemas de impulsión de uso general son:
Sistema de impulsión del motor servo de AC/branch, sistema de impulsión del motor de pasos, motor servo linear/sistema de impulsión linear del motor de pasos. Cada sistema de impulsión consiste en un motor y un conductor. La función del conductor es amplificar la señal débil y cargarla en el motor eléctrico fuerte para conducir el motor. El motor convierte señales eléctricas de precisar velocidad y la dislocación angular.
En las ocasiones que requieren altas dinámicas, la operación de alta velocidad, la impulsión de alta potencia y otras ocasiones, sistema del motor servo de AC/branch se utiliza como la impulsión; en los requisitos de la dinámica baja, de la operación de poca velocidad, de la impulsión de baja potencia y de otras ocasiones, el sistema del motor de pasos se puede utilizar como la impulsión; La dinámica muy alta, la operación de alta velocidad, la alta exactitud de colocación y otras ocasiones utilizarán la impulsión serva linear.
El control coordinado cartesiano del robot para realizar la función flexible y variada del robot del movimiento y la función de proceso rápida de la respuesta, el robot debe tener un sistema del cerebro-control.
La función del sistema de control es publicar las instrucciones del movimiento, datos de proceso, determina el movimiento, el etc. Puede publicar instrucciones de control, recibir señales de retorno, y determina la información de proceso en cualquier momento según el programa numerado.
Dependiendo de la situación de trabajo, el sistema de control puede tomar muchas diversas formas:
1. Combinación de IPC y de tarjeta de control del movimiento: La tarjeta de control del movimiento pide prestados recursos del ordenador y utiliza su propia función de control del movimiento para alcanzar control.
2, tarjeta de control off-line del movimiento: Pida prestado el ordenador para hacer el programa, puede almacenar el programa sí mismo, corre off-line.
3, PLC - pida prestado un ordenador para compilar un programa, el programa puede ser almacenado, funcionamiento off-line.
4, regulador dedicado.
Con eso bueno de sistema de control, el ingeniero de control del movimiento elegirá según la situación real dependiendo de la situación del deporte y de las condiciones del uso.
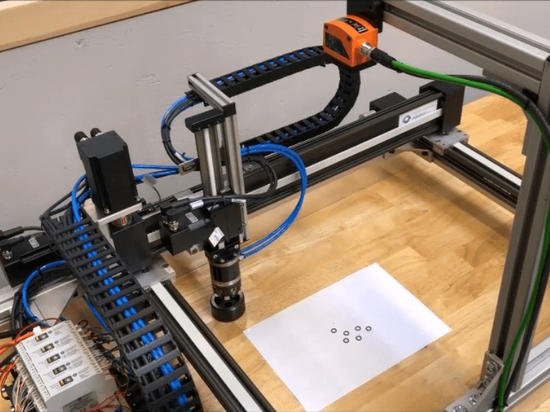
Equipo de terminal del robot cartesiano - los coordenadas cartesianos de funcionamiento de las herramientas el equipo de terminal del robot deben utilizar diferente, se pueden equipar de una variedad de herramientas de funcionamiento:
Por ejemplo, una herramienta terminal de la operación del robot de soldadura es un soplete: una herramienta terminal de la operación del robot que empalieta es un agarrador; una herramienta terminal de la operación del robot del pegamento (dispensación) es un arma de pegamento, una herramienta terminal de la operación del robot de la detección (supervisión) es una cámara o un laser.
Algunas tareas trabajo-intensivas no se pueden terminar con una sola herramienta de funcionamiento. Es necesario instalar herramientas de dos o funcionamientos. Por ejemplo, además de la necesidad de un agarrador mecánico, una cámara también se requiere para la captura de un objeto móvil no estacionario, que sigue constantemente la posición espacial del objeto calculado.