Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
¿qué hace un robot un robot cartesiano?
En comparación con otro tipo de robot o de sistema multiaxial.
Primero, un sistema cartesiano es uno que se mueve en tres, hachas ortogonales — X, Y, y Z — según los coordenadas cartesianos. (Aunque debe ser observado que un eje rotatorio — bajo la forma de efector final o extremo de los útiles del brazo — se incluye a veces en el eje exterior de un robot cartesiano.)
Qué hace un robot cartesiano un robot es que las hachas realizan el movimiento coordinado, a través de un regulador común del movimiento.
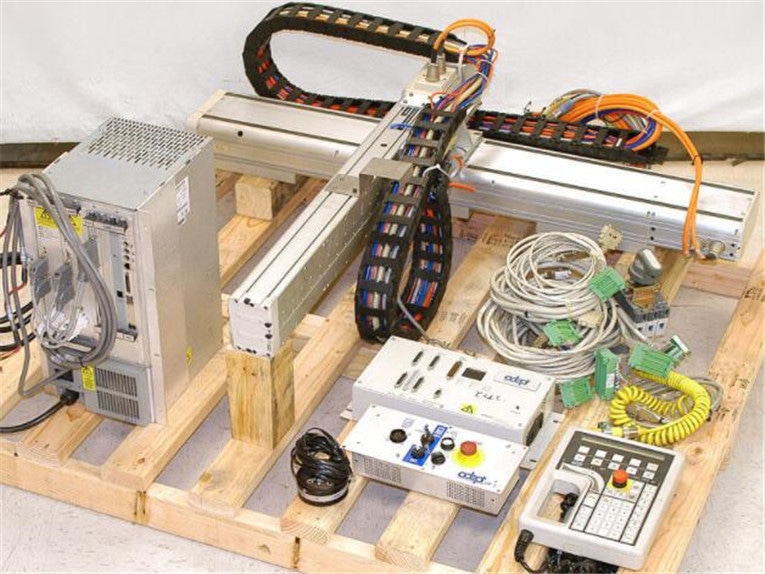
Las hachas de un robot cartesiano se hacen de una cierta forma de actuador linear — o comprado como un sistema premontado de un fabricante o a la medida por el OEM o usuario final de la guía linear y de los componentes impulsores.
¿Simple, derecho?
El estándar del 8373:2012 del ISO define un robot industrial como:
Un automáticamente controlado, reprogramable, manipulante multiusos programable en tres o más hachas, que se pueden tampoco fijar en el lugar o móvil para el uso en usos de la automatización industrial.
Pero no cada sistema linear que trabaja en el X-Y, o las hachas de X-Y-Z es un robot cartesiano. Una excepción notable es un tipo de robot que emplee dos (x) hachas bajas paralelamente. Esta configuración — 2X-Y o 2X-Y-Z, por ejemplo — se traslada el robot de la categoría cartesiana y a la categoría de robots del pórtico.
La diferencia primaria entre el pórtico y los robots cartesianos es que un robot cartesiano utiliza un actuador linear en cada eje, mientras que un robot del pórtico se construye siempre con dos (x) hachas bajas, con el segundo (y) eje atravesándolas. Esta configuración evita el segundo eje sea cantilevered (más en ése abajo) y permite que los pórticos tengan longitudes de mucho movimiento más largas — y en muchos casos, cargas útiles más grandes — que los robots cartesianos.
El segundo tipo de sistema linear multiaxial que no caiga bajo definición del robot cartesiano es la tabla XY. La diferencia entre los robots cartesianos y las tablas XY miente en el montaje y el arreglo cargado. En un robot cartesiano, el segundo o el tercero (Y o Z) el eje es cantilevered, siendo apoyado en solamente un extremo por el eje debajo de él. Además, la carga en el eje externo es generalmente cantilevered de ese eje.
Este arreglo crea no sólo una carga del momento en el eje externo, debido a la carga aplicada, pero también a una carga significativa del momento en el eje favorable, debido al efecto combinado de la carga aplicada junto con el eje externo. El montaje y el arreglo cargado limita la capacidad carga-que lleva de robots cartesianos y es un factor primario en la determinación de la longitud de movimiento máxima para el eje (cantilevered) externo.
En cambio, las tablas XY consisten en dos hachas centradas encima de uno a, a menudo con longitudes de movimiento similares. Además, la carga se centra generalmente en el eje de Y. Esta configuración y carga del eje que colocan resultados en el cargamento cantilevered muy pequeño en cualquier eje (y a menudo ningún cargamento cantilevered en el eje de Y).
Los robots cartesianos coinciden SCARA y 6 robots del eje (articulado) en algunas especificaciones técnicas y se pueden aplicar en algunos de los mismos usos, pero los robots cartesianos tienen varias ventajas sobre SCARA y 6 tipos del eje. Primero, los diseños cartesianos proporcionan un sobre rectangular del trabajo en el cual un porcentaje significativo de la huella del robot se utilice como área de trabajo activa. SCARA y 6 tipos del eje, por otra parte, tienen circular o los sobres ovales del trabajo que dan lugar a menudo a mucho espacio (inusitado) muerto, especialmente cuando el viaje requerido, o el alcance, es muy largos.
Los robots cartesianos se pueden construir de virtualmente cualquier tipo de actuador linear con cualquier variedad de mecanismos de arrastre — correa, bola o tornillo de posicionamiento, actuador neumático, o motor linear. (Observe ese estante y las impulsiones del piñón son también posibles, pero se utilizan generalmente en sistemas del pórtico con los movimientos muy largos.) Esto significa que pueden, y a menudo que hacen, que tienen una mejores exactitud y repetibilidad de colocación que SCARA y 6 tipos del eje. Los robots cartesianos también tienen una ventaja de fácil utilización en términos de programación porque su cinemática es más simple (tres hachas cartesianas, bastante que las hachas rotatorias múltiples).
En el pasado reciente, los robots cartesianos premontados eran raros, con la mayoría de las unidades siendo a la medida por un OEM, un integrador del robot, o aún el usuario final. Pero ahora, muchos fabricantes del actuador linear también proveen de sistemas cartesianos preconfigurados, premontados, opciones innumerables para caber viaje común, la carga útil, la velocidad, y requisitos de la precisión. Y los fabricantes de 6 ejes tradicional y los robots de SCARA están consiguiendo adentro en la acción también, reconociendo eso para muchos automatización industrial y los usos de la asamblea, los robots cartesianos ofrecen un mejor equilibrio entre la capacidad de carga y la huella que SCARA y 6 diseños del eje.


