#Tendencias de productos
Robot JANOME / Función Conveniente / Condición PTP
Parámetros optimizados para reducir los tiempos de ciclo.
★CONSEJOS ★
Con la configuración de las "Condiciones PTP", puedes especificar la altura del movimiento del eje Z desde el punto final de un Profundizado en Línea hasta el siguiente punto de inicio.
● Puedes elegir aplicar estas configuraciones a todos los programas, a programas individuales (como se muestra en el video) o a puntos específicos.
● Los parámetros permiten ajustar el momento de la altura del eje Z según los obstáculos de la pieza u otras necesidades.
● Es posible realizar ajustes precisos directamente en los parámetros de la condición PTP, sin necesidad de añadir nuevos datos de puntos en el programa.
En el video de demostración, logramos ahorrar 3 segundos.
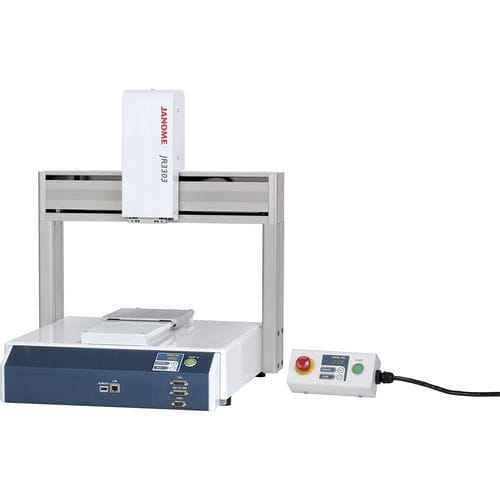
Estas funciones están disponibles en nuestros robots de escritorio, robots cartesianos y robots SCARA.