Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Novedades de la industria
{{{sourceTextContent.title}}}
Cómo nace un robot
{{{sourceTextContent.subTitle}}}
La importancia de los pequeños motores sin escobillas en robótica
{{{sourceTextContent.description}}}
Cuando la gente imagina robots, suele pensar en máquinas futuristas o brazos automatizados en entornos industriales.
Pero detrás de cada robot hay un complejo sistema de componentes, y uno de los más importantes es el movimiento. Sin movimiento, un robot no puede funcionar, y los motores eléctricos compactos de alto rendimiento impulsan ese movimiento.
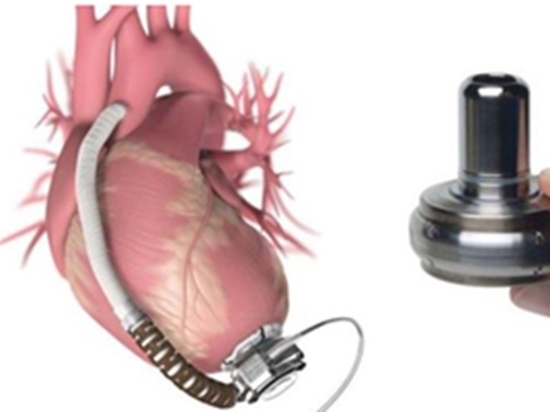
En la robótica moderna, especialmente en aplicaciones colaborativas y brazos robóticos, son esenciales los motores pequeños sin escobillas, como los motores de corriente continua sin escobillas (motores BLDC). Estos motores proporcionan la precisión, eficiencia y fiabilidad necesarias en los sistemas robóticos, desde la automatización industrial hasta la cirugía robótica.
Un ingeniero en robótica suele empezar con una visión: un brazo mecánico capaz de realizar tareas delicadas o un actuador robótico que debe funcionar con gran precisión. Para dar vida a esta visión, necesitan encontrar los componentes adecuados, seleccionando en un grueso catálogo un motor eléctrico sin escobillas que se ajuste a los requisitos de diseño y rendimiento.
Sin embargo, los motores de corriente continua estándar de estos catálogos suelen presentar importantes inconvenientes que en un principio no resultan evidentes. Por ejemplo, el par de arrastre o la escasa eficiencia para el par de funcionamiento real pueden provocar sacudidas o ineficiencias significativas, que no son aceptables en aplicaciones de alto rendimiento.
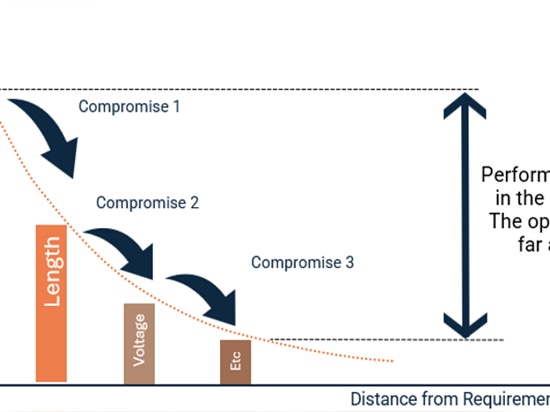
Los ingenieros también se enfrentan a problemas de desajustes en la tensión del sistema, dimensiones del motor y par insuficiente, que pueden requerir componentes adicionales como cajas de engranajes. Estos compromisos conducen a diseños subóptimos que reducen la eficiencia. Además, el uso de un motor de catálogo hará que su aplicación sea muy fácil de copiar por los "me-too".
Gráfico que muestra cómo disminuye el rendimiento con la distancia a los requisitos, poniendo de relieve los compromisos y la pérdida de rendimiento"
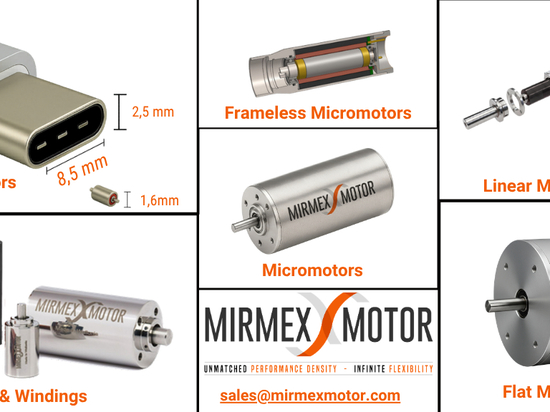
Aquí es donde Mirmex destaca. Utilizando tecnología avanzada de bobinado de sustrato PCB flexible, creamos bobinados de motor eléctrico personalizados que son compactos, eficientes y se adaptan a sus necesidades exactas. Tanto si está desarrollando un servo robot, un microgenerador o un pequeño motor eléctrico para un robot colaborativo, nuestras soluciones están diseñadas para adaptarse a su sistema, y no al revés.
Nuestros motores no tienen engranaje, están optimizados para configuraciones de motor de flujo radial o axial y son escalables hasta pequeños microactuadores.
Esta flexibilidad permite a los ingenieros diseñar sin compromisos, liberando todo el potencial de sus sistemas robóticos y creando una importante barrera de entrada para los competidores.
Dos robots opuestos, uno junto al otro, con el texto "EL RESULTADO DE HACER COMPROMISOS".
En Mirmex sabemos que cada proyecto es único. Por eso trabajamos en estrecha colaboración con nuestros clientes para desarrollar motores eléctricos de CC sin escobillas que cumplan y superen las expectativas.
Tanto si trabaja en cirugía robótica como en automatización industrial o en robots colaborativos de última generación, nuestros motores de alto rendimiento están diseñados para cumplir sus expectativas.
No deje que las limitaciones de los motores eléctricos estándar le frenen. Póngase en contacto con nosotros hoy mismo para obtener un análisis de diseño de motores de primera pasada y descubra cómo nuestras soluciones de motores personalizados pueden transformar sus ideas en realidad. ¡Estamos aquí para ayudarle a conseguir la mejor solución!