Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Libros blancos
{{{sourceTextContent.title}}}
Motor con ranuras frente a motor sin ranuras:
{{{sourceTextContent.subTitle}}}
¿Cuál es la diferencia? (Parte 1)
{{{sourceTextContent.description}}}
Si está leyendo este artículo, lo más probable es que ya esté familiarizado con los distintos tipos de motores eléctricos, y es posible que se haya topado con el término "motor sin ranuras". Si no es así, no te preocupes: este artículo comienza con una breve explicación.
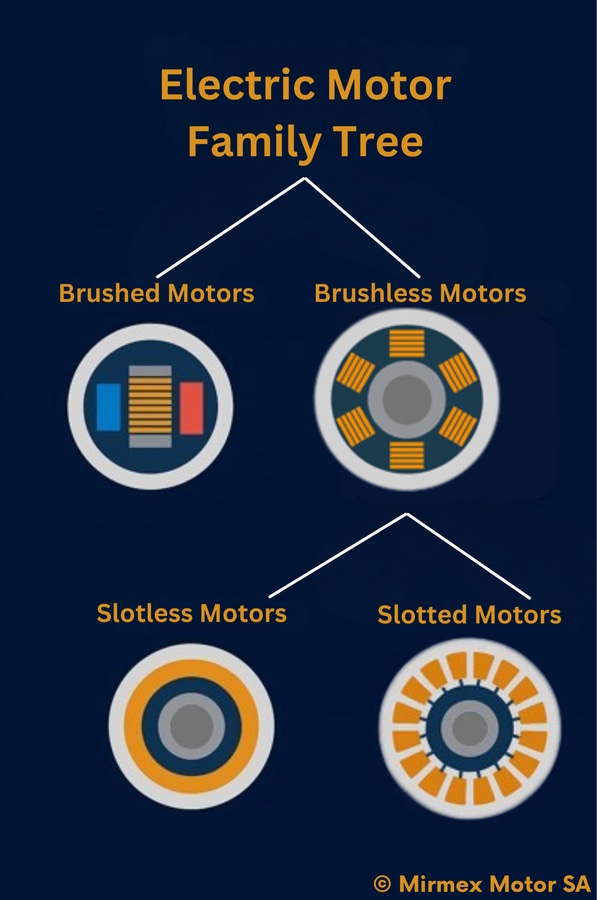
Como muchos otros componentes tecnológicos, los motores eléctricos tienen su propio árbol genealógico que puede separarlos.
Al igual que se puede diferenciar entre un motor sin escobillas y un motor con escobillas, los motores eléctricos también se pueden clasificar como ranurados o sin ranuras.
Como su nombre indica, y al igual que los motores sin escobillas, que carecen de escobillas, los motores sin ranuras se fabrican sin las ranuras (las hendiduras en el núcleo del estator) presentes en los diseños convencionales. En la imagen anterior, puede observar este concepto de forma simplificada a través de un diagrama de motor eléctrico sin escobillas.
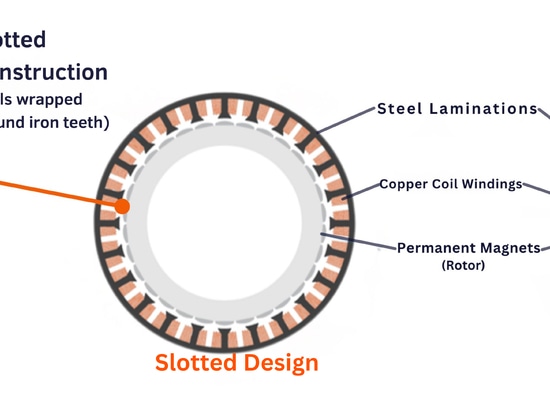
Normalmente, un diseño de motor ranurado incluye ranuras en el núcleo del estator. Estas ranuras alojan físicamente los devanados conductores de corriente, que actúan como electroimanes: cuando la corriente pasa a través de ellos, generan campos electromagnéticos.
Además de su función estructural de sujeción de los devanados, estas ranuras también ayudan a guiar el flujo magnético hacia el entrehierro.
El entrehierro, que es el espacio entre el rotor y el estator, es la región crítica donde interactúan el flujo magnético de los devanados del estator (a través de las ranuras) y los imanes del rotor. Esta interacción es la que, en última instancia, acciona el motor. Este concepto se ilustra claramente en la siguiente imagen.
Por el contrario, los motores sin ranuras o, como se denominan comúnmente, ''motores sin núcleo'' utilizan un enfoque diferente. Los motores sin ranuras o sin núcleo son los que comercializa Mirmex.
Estos motores sin ranuras no contienen un núcleo de acero con ranuras y se basan únicamente en la geometría de los devanados del motor para amplificar el flujo magnético. Normalmente, la disposición de los devanados es más sencilla, como se muestra a continuación. En general, el diseño ranurado mejora la creación de campos electromagnéticos alrededor de los devanados de cobre, lo que resulta en un mayor flujo magnético en el entrehierro.
Esta geometría específica conlleva tanto ventajas como inconvenientes, que exploraremos más a fondo a lo largo de este artículo. Estas ventajas e inconvenientes pueden ser especialmente relevantes en función de la aplicación.
Comparación de los diseños de motor con y sin ranuras, mostrando los devanados de la bobina alrededor de los dientes de hierro en la construcción con ranuras y los componentes etiquetados, como las laminaciones de acero, los devanados de cobre y los imanes permanentesTorque de arrastre
Una diferencia clave entre los motores con y sin ranuras radica en su suavidad de rotación.
En los motores ranurados, como ya se ha explicado, las ranuras redirigen el flujo magnético a través de su forma, amplificándolo localmente. Esto crea regiones de mayor flujo magnético que interactúan con los polos magnéticos del rotor. A medida que el rotor gira, estas interacciones provocan una perturbación periódica conocida como par cogging, un efecto de "hipo" que interrumpe la suavidad de la rotación.
En cambio, los motores sin ranuras eliminan este problema. Al no haber ranuras que concentren el flujo magnético en regiones específicas, el campo magnético permanece más uniforme. Como resultado, un motor eléctrico sin ranuras presenta un par de arrastre nulo, lo que se traduce en una rotación perfectamente suave.
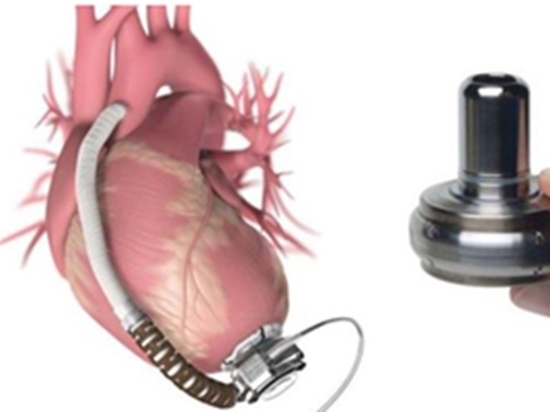
Esta suavidad se traduce en un buen rendimiento NVH, como bajo nivel de ruido, vibraciones mínimas y mayor controlabilidad, lo que permite un control más preciso del movimiento. Estas características hacen que los motores sin ranuras resulten especialmente atractivos para aplicaciones que exigen una gran precisión y un funcionamiento silencioso, como los motores para prótesis, los motores para herramientas quirúrgicas y los motores para herramientas médicas en general.
Tras presentar los conceptos básicos de los diseños de motores eléctricos con y sin ranuras y destacar las principales diferencias entre ellos, permanezca atento a la segunda parte de esta serie de blogs, en la que profundizaremos en los factores específicos de rendimiento que los diferencian.
Aunque nuestros motores no tienen engranajes, ¡asegúrese de estar preparado para la próxima entrada!