Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Novedades de la industria
{{{sourceTextContent.title}}}
¿Qué es la cartografía móvil?
{{{sourceTextContent.subTitle}}}
Guía completa para principiantes
{{{sourceTextContent.description}}}
La cartografía móvil es uno de los usos más interesantes de la tecnología de localización, especialmente de la tecnología GNSS/INS como la nuestra. Este blog ha sido concebido como el manual definitivo sobre cartografía móvil para todos aquellos que deseen saber más sobre esta tecnología y sistemas cartográficos como el LiDAR móvil. ¿Qué es la cartografía móvil?
¿Qué es la cartografía móvil?
Cualquier actividad que implique la medición de algo desde un vehículo en movimiento es un tipo de cartografía móvil. En términos generales, la cartografía móvil se agrupa en actividades de cartografía terrestre y aérea. La cartografía móvil terrestre, también llamada a veces cartografía móvil de carreteras, es la que se realiza desde un coche. Los coches de Google Streetview son probablemente uno de los ejemplos más públicos de cartografía móvil basada en la carretera.
La cartografía aérea, por supuesto, es la que se realiza desde el aire. Puede hacerse desde un pequeño cuadricóptero o desde un avión más grande, tripulado o no.
Tecnología clave de la cartografía móvil
En cualquier carga útil de cartografía móvil (que es el nombre que recibe el conjunto de sensores y tecnología utilizados para el levantamiento), hay algunos componentes comunes:
1. Los sensores utilizados para recopilar los datos de la encuesta
2. La solución de localización
El proceso de combinar estos dos conjuntos de datos se conoce como georreferenciación. Una vez georreferenciados, los datos topográficos adquieren una posición fija en la Tierra, lo que permite utilizarlos para los fines previstos.
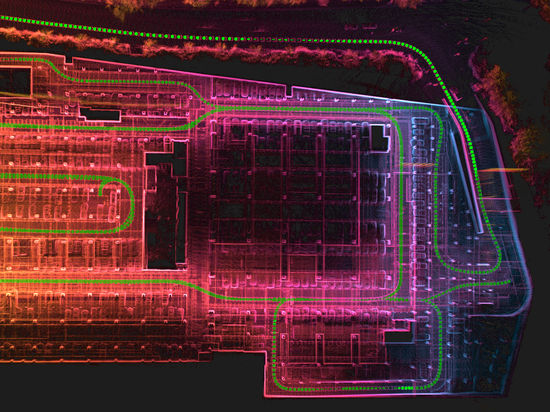
Para el levantamiento se puede utilizar una amplia gama de sensores. El más común históricamente ha sido la cámara, que crea una imagen fotográfica como resultado del levantamiento. Más recientemente, LiDAR (Light Detection And Ranging) se ha convertido en un método popular de topografía. LiDAR utiliza láseres para medir la distancia entre el sensor y los objetos del entorno, produciendo millones (o incluso miles de millones) de "puntos" que componen el estudio. El resultado final de un LiDAR se conoce como nube de puntos, que se asemeja a un modelo 3D de la zona estudiada.
Más allá de eso, casi cualquier sensor puede utilizarse para la topografía. A menudo se utilizan el radar y las imágenes hiperespectrales, pero en el pasado hemos trabajado con clientes para ayudarles a georreferenciar datos procedentes de distintos sensores, incluidos equipos de detección de gases. Siempre que pueda georreferenciar los datos con su tecnología de localización, podrá utilizar su sensor en una prospección.
Localización cartográfica móvil
En la actualidad, el método más popular de localización para cartografía móvil es una combinación de datos GNSS y una IMU (unidad de medición inercial).
GNSS significa Sistema Global de Navegación por Satélite y se refiere a constelaciones de satélites en el espacio que proporcionan datos de posición. El GPS, por ejemplo, es un ejemplo de GNSS.
Más información sobre GNSS
Una IMU es un conjunto de giroscopios y acelerómetros que miden los cambios de velocidad, aceleración y momento angular, que se utilizan para estimar el rumbo, la velocidad y la orientación (entre otras cosas) de un objeto. Una IMU combinada con datos GNSS suele denominarse sistema de navegación inercial asistido por GNSS, o GNSS/INS. La combinación de ambos hace que el sistema sea más robusto: el INS permite identificar cualquier error en los datos del satélite, quizás causado por una caída en la cobertura del satélite, mientras que el GNSS corrige la deriva gradual de la posición a la que está sujeta cualquier IMU.
Cómo funciona la cartografía móvil
Normalmente, el proceso de cartografía móvil consta de los siguientes pasos:
1. Configuración: construya su carga útil de topografía, asegurándose de que sus sensores están estrechamente integrados para ofrecerle la mejor calidad de salida.
2. Recopilar los datos: realizar el levantamiento, ya sea en tierra o en el aire, recopilando tanto los datos del levantamiento como los de localización en tiempo real.
3. Procesamiento: una vez recopilados los datos, hay que combinar los dos conjuntos de datos para obtener un resultado final. Aquí hay algunos pasos secundarios: es probable que ejecutes algunos algoritmos de posprocesamiento en tus datos de localización para maximizar la precisión de esos datos, y luego ejecutarás un paso separado de georreferenciación en el que los datos de posición se combinan con los datos topográficos.
Los detalles del flujo de trabajo variarán en función del sensor que se utilice. Por ejemplo, si utiliza un dispositivo LiDAR móvil, tendrá que añadir un paso de calibración de la altura de puntería antes de realizar el levantamiento para alinear con precisión el escáner LiDAR y el GNSS/INS, a fin de evitar imágenes borrosas.