Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Novedades de la industria
Cómo evitar la resonancia con los motores paso a paso
Los motores paso a paso son motores eléctricos sin escobillas, normalmente con un elevado número de polos.
Suelen utilizarse como una solución de posicionamiento fácil y rentable, ya que pueden accionarse paso a paso sin necesidad de un sistema de retroalimentación de la posición del rotor (como un codificador o un sensor Hall integrado). Esta forma de accionar un motor sin retroalimentación también se denomina control de "bucle abierto". Sin embargo, el diseño de estos motores y la forma de accionarlos pueden dar lugar a problemas en determinadas condiciones. En este artículo, revisaremos diferentes formas de evitar estos problemas y asegurar un movimiento adecuado.
GENERALIDADES SOBRE LOS MOTORES PASO A PASO
Las fases del motor paso a paso se conmutan secuencialmente mediante un controlador electrónico externo que, posteriormente, moverá el rotor (que suele llevar un imán permanente) de una posición estable a la siguiente. El motor elegido debe ofrecer un par suficiente para mover el rotor y la carga al siguiente paso después de cada conmutación. Si el par no es suficiente o si la velocidad es demasiado alta, se corre el riesgo de perder el sincronismo entre el conductor y la posición real del rotor. Esto puede provocar una pérdida de pasos, posibles cambios en el sentido de giro y un movimiento general errático.
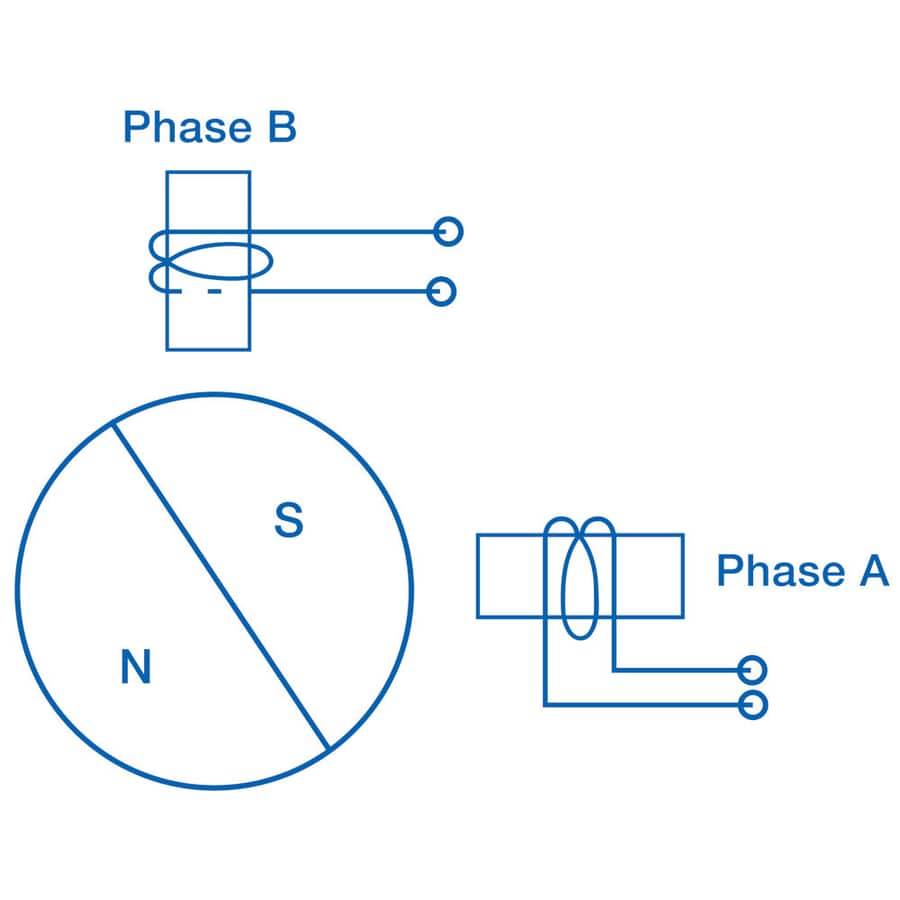
La figura 1 muestra el concepto de un motor paso a paso bifásico muy sencillo con un par de polos. La secuencia de conmutación accionada electrónicamente (A, B, -A, -B) creará una revolución completa del rotor en cuatro pasos (90° por paso).
OSCILACIÓN ALREDEDOR DE LA POSICIÓN ESTABLE
En cada paso, el rotor tiende a alinear sus polos con los del estator. Mientras una fase esté energizada continuamente (sin cambiar a la siguiente fase), el rotor mantiene una posición estable.
La figura 2 muestra que si el rotor se adelanta a la posición objetivo, el motor desarrollará un par negativo que tenderá a tirar del rotor hacia la posición objetivo. Por otro lado, cuando el rotor se encuentra antes de la posición objetivo (a la izquierda), un par positivo empujará el rotor hacia delante en la dirección de la posición objetivo. En estas condiciones, parece que puede producirse fácilmente un fenómeno de oscilación, ya que la inercia del rotor (incluida la inercia de la carga, si la hay) impedirá que el rotor se detenga exactamente en la posición estable. Cada vez que el rotor se desplaza desde una posición estable a la siguiente posición estable (un paso más allá), la posición angular suele sobrepasar la posición objetivo del rotor debido a su energía cinética a medida que se acerca. Entonces comenzará a oscilar alrededor de la posición tan pronto como el par negativo llame al rotor de vuelta a la posición objetivo. La frecuencia natural de esta oscilación periódica puede calcularse como sigue:
Sin embargo, esta oscilación reducirá su magnitud con el tiempo, gracias a las pérdidas del sistema. Esta reducción de la amplitud suele denominarse "amortiguación" y depende de varios factores. A la larga, el amortiguamiento siempre llevará al rotor a una posición de reposo si sólo se energiza una fase, pero en algunos casos, tiene sentido optimizar el amortiguamiento cuando las fases se energizan secuencialmente (conmutación).
A alta velocidad, el periodo de conmutación se acorta, y si la oscilación no ha terminado antes de que se ordene el siguiente paso, existe el riesgo de que se produzca una resonancia (la tendencia del sistema mecánico a responder con una amplitud mayor). Esto ocurrirá probablemente si la frecuencia de conmutación está cerca de la frecuencia natural del sistema, como se ve en la figura 3.
La resonancia puede provocar un funcionamiento errático del motor, perdiendo pasos y cambiando el sentido de giro de forma aleatoria. Por lo tanto, es importante tomar medidas preventivas para evitar que se produzca cualquier resonancia para asegurar un correcto sincronismo entre el comando y la posición real del rotor.
FORMAS DE EVITAR LA RESONANCIA
Evitar la frecuencia natural
La resonancia suele producirse cuando la frecuencia de conmutación está cerca de la frecuencia natural de vibración del sistema mecánico. En consecuencia, la forma más básica de evitar la aparición de resonancia es mantener la frecuencia de conmutación alejada de la frecuencia natural del sistema utilizando los parámetros descritos. Sin embargo, no siempre es posible cambiar la frecuencia de conmutación, ya que a veces se necesitan otros cambios para compensar el cambio de velocidad.
Desplazamiento de la frecuencia natural
En lugar de cambiar la frecuencia de conmutación, es mejor desplazar la frecuencia natural a una frecuencia más alta o más baja para evitar que la frecuencia de conmutación coincida con ella. Esto se suele hacer trabajando sobre los dos parámetros que influyen en la frecuencia natural: el par de retención y la inercia total del sistema.
- Par de retención
Normalmente, un motor está dimensionado para ser utilizado a su corriente nominal, que define el par de retención. El uso de una corriente más alta (para aumentar el par de retención) no es posible para un funcionamiento continuo, ya que las mayores pérdidas de joule darían lugar a una temperatura excesiva de la bobina. Sin embargo, es posible utilizar una corriente más baja (para conseguir un par de retención más bajo y desplazar la frecuencia natural hacia abajo) si el par más bajo es suficiente para las necesidades de la aplicación.
- Inercia
El momento de inercia del sistema mecánico es la suma de la inercia del rotor del motor más la inercia de la carga. El desarrollador del motor puede cambiar la inercia del rotor implementando cambios en el diseño. La frecuencia de resonancia natural de un motor sin carga suele figurar en las especificaciones del motor. Si no, el usuario puede trabajar con la inercia de la carga (completamente independiente del motor). Si se aumenta la inercia, la frecuencia natural del sistema bajará, y viceversa. La modificación de la inercia del sistema también puede afectar al rendimiento del motor en la aplicación y debe confirmarse con el proveedor del motor para garantizar un funcionamiento correcto.
Evite la resonancia con el micropaso
Cuanto mayor sea la energía aportada al sistema mecánico, mayor será el riesgo de que se produzca un fenómeno de resonancia. Para evitarlo, el micropaso puede ser una buena solución en lugar de accionar un motor paso a paso con pasos completos. Cada micropaso (medio paso, ¼ de paso, etc.) tiene un ángulo de paso menor y requiere menos energía para pasar de una posición estable a la siguiente. El rebasamiento de la posición objetivo es menor y también lo es la magnitud de la oscilación, lo que suele ser una forma eficaz de evitar la resonancia.
Además, el micropaso suele ofrecer menos ruido, menos vibraciones y un funcionamiento más suave. Los motores paso a paso suelen ser accionados en micropasos.
Evitar la resonancia con la amortiguación
Hay varios tipos de factores de amortiguación:
- Fricción de la carga y Fricción del rodamiento del motor
La fricción proporciona un par de rotura (opuesto al sentido de giro instantáneo) que es constante, independientemente de la velocidad del motor. Aunque ayuda a amortiguar la oscilación y evita la resonancia, hay que tener en cuenta que la fricción también se suma a la carga aplicada al motor a cualquier velocidad. Por lo tanto, es importante asegurarse de que el rendimiento del motor es suficiente cuando se añade la fricción para evitar la resonancia.
- Fricción viscosa
La fricción viscosa también proporciona un par de rotura, pero su magnitud depende de la velocidad del motor. Cuanto mayor sea la velocidad, mayor será la amortiguación viscosa. Suele ser la forma preferida de amortiguar un movimiento oscilante. Proporciona una fuerte rotura mientras la amplitud de la oscilación es grande (mayor velocidad al principio) y sólo una rotura muy ligera una vez que la oscilación es menor (a diferencia de la fricción seca que proporciona la misma magnitud de rotura incluso a muy baja velocidad). En consecuencia, el rozamiento viscoso es una buena forma de amortiguar la oscilación en muy poco tiempo y sin añadir demasiada carga al motor.
Hay diferentes fenómenos que pueden aportar fricción viscosa a un sistema:
"Las corrientes de Foucault generadas en el hierro del estator (pérdidas en el hierro), que actúan como par de frenado. Estas pérdidas son mayores cuando la velocidad es mayor, y no existen en ausencia de movimiento, por lo que pueden considerarse como rozamiento viscoso. Dependiendo del diseño y la tecnología del motor, las pérdidas en el hierro pueden ser diferentes de un motor a otro. Los motores de imanes de disco suelen tener pérdidas de hierro limitadas que les permiten alcanzar velocidades relativamente altas. Por lo tanto, no se debe confiar únicamente en las pérdidas en el hierro para amortiguar la oscilación de un motor de imanes de disco y se puede considerar otra forma de evitar la resonancia con un motor de este tipo.
"FEM de retorno (tensión) inducida en la bobina, que da lugar a una corriente y a un par de rotura que amortiguará la oscilación. Esta corriente suele permitirse cuando se cortocircuita la fase no energizada, y dado que es proporcional a la velocidad del motor (cuanto mayor sea la velocidad, más fuerte será el par de rotura), también puede considerarse como una fricción viscosa. Los drivers chopper (de corriente constante) no suelen permitir este tipo de amortiguación, ya que la corriente se mantiene constante a pesar de las variaciones del Back-EMF.
"Las soluciones de amortiguación electrónica pueden aplicarse accionando el motor de una manera determinada sin cambiar ningún parámetro mecánico del sistema.
"También se puede añadir un amortiguador mecánico externo en la aplicación o en el motor para absorber parte de la energía de la vibración mediante la fricción viscosa para evitar la resonancia.
CONCLUSIÓN
El funcionamiento paso a paso y secuencial de los motores paso a paso puede provocar problemas de resonancia siempre que se den simultáneamente las condiciones favorables para ello. A veces, actuar sobre una sola de estas condiciones puede ser suficiente para eliminar la resonancia. También hay que tener en cuenta que, en función de la tecnología y el diseño del motor, puede haber otros rangos de frecuencia susceptibles de desencadenar la resonancia, aparte de la frecuencia de oscilación natural. Entre ellos se encuentra, por ejemplo, la resonancia de frecuencia media. Los proveedores de motores pueden ayudarle a determinar qué rangos de frecuencia son susceptibles de desencadenar una resonancia y cómo prevenir su aparición.


