Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
Aplicación del escáner Cygnus SLAM en estudios forestales
Mediante el escáner Cygnus SLAM en la zona forestal, es posible obtener rápidamente una estructura vertical forestal de alta precisión.
Antecedentes del proyecto
Las nubes de puntos reflejan la relación posicional de objetos objetivo en el espacio tridimensional y son una de las formas de datos importantes para extraer información sobre recursos forestales.
Con la profundización del estudio de los recursos forestales, el método de adquisición de información espacial basado en lidardata de plataforma única tiene las deficiencias de la baja precisión y la escasa integridad de los datos, lo que no puede satisfacer los requisitos de la silvicultura de precisión para la alta precisión de la extracción de información forestal.
Resumen de la solución
Basándonos en el estudio preliminar de la zona forestal, elegimos un UAV LiDAR de bajo coste y un sistema SLAM móvil como solución para recopilar la información más completa sobre los árboles mediante la fusión de datos aéreos y terrestres.
Para fusionar los datos, seleccionamos el sistema SLAM móvil de mochila Cygnus con RTK. Debido a la escasa señal de la red local, nuestra mochila SLAM RTK comparte la misma estación base con el sistema LiDAR del dron, la comunicación se conecta a través del modo de estación de radio externa.
Los dos métodos se recogen al mismo tiempo. El dron captura el área unos 11 minutos, y la mochila SLAM escanea incluyendo 2 escaneos y un escaneo tarda 30 minutos. La trayectoria de escaneado del SLAM móvil adopta una trayectoria en forma de serpiente alrededor del árbol, y la brecha de escaneado no supera los 10 m según las condiciones del terreno. Para el problema de que el RTK no puede fijarse debido a la oclusión del árbol de vez en cuando, intentamos repetir el escaneo tanto como sea posible en el caso de RTK fijo para aumentar las restricciones de las observaciones RTK fijas en la trayectoria SLAM.
Comparación de sistemas LiDAR multiplataforma
Debido al complejo entorno forestal y a la densa oclusión, el funcionamiento de una única plataforma LiDAR es limitado, y el alcance del escaneado no puede cubrir toda la zona forestal, lo que provoca un agujero de datos en la adquisición de información espacial, dificultando su aplicación en zonas forestales complejas. Para obtener nubes de puntos forestales más detalladas, se suele utilizar la combinación de plataformas LiDAR.
Datos LiDAR UAV
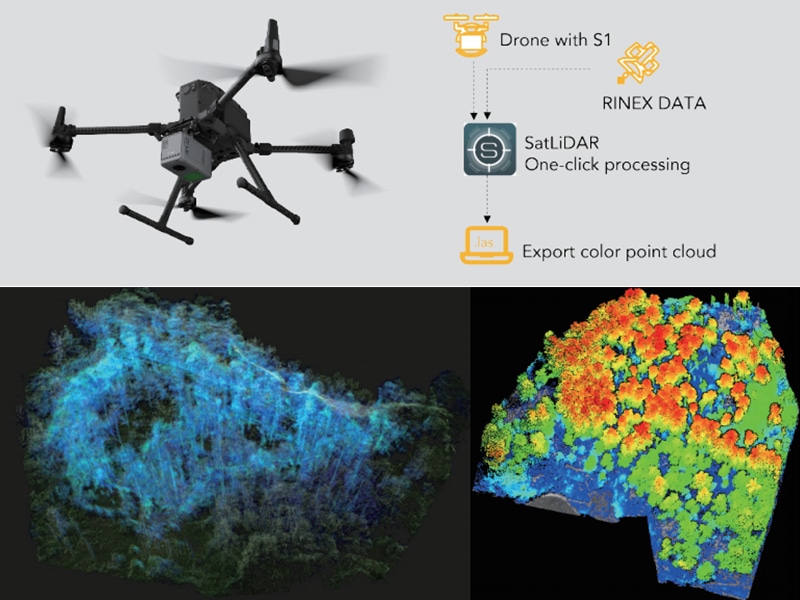
Para el sistema UAV LiDAR, utilizamos el SatLab S1 UAV LiDAR, que puede recoger la nube de puntos y los datos de imagen al mismo tiempo. Tras procesar los datos RINEX, importamos los datos de GNSS, IMU, láser e imagen al software SatLiDAR para combinar los datos con un solo clic y exportar la nube de puntos en color final (archivo *.las).
El dron tiene un tiempo de vuelo de unos 11 minutos, la densidad de la nube de puntos es de 508,79 pts/m2. A continuación se muestran la nube de puntos LiDAR del UAV y la sección transversal. Los datos que faltan pueden verse debajo de la cubierta.
Datos SLAM de la mochila
El sistema SLAM de mochila SatLab Cygnus puede verse en la figura 2. Los datos SLAM de salida pueden transformarse en coordenadas locales para su georreferenciación. La nube de puntos SLAM se muestra en la figura 10. La densidad de la nube de puntos es de unos 2539,59 pts/m2.
Fusión y procesamiento de datos
Colocamos la nube de puntos LiDAR UAV y la nube de puntos SLAM en el mismo sistema de coordenadas y segmentamos el área de interés para extraer la información forestal. En la figura 11 se muestra la fusión de la nube de puntos LiDAR UAV y la nube de puntos SLAM y la sección transversal de los datos de fusión. La combinación de los dos métodos muestra la estructura completa del árbol. La densidad de la nube de puntos de fusión es de 4701,48 pts/m2.
Teniendo en cuenta que el procesamiento masivo de nubes de puntos consume una gran cantidad de recursos informáticos, dividimos la nube de puntos de fusión en bloques y mediante remuestreo y eliminación de ruido obtenemos los datos relativamente limpios. A continuación, utilizamos el filtro de simulación de tela (CSF) y la densificación progresiva TIN (PTD) como filtrado de tierra para clasificar la nube de puntos de tierra. Basándonos en los puntos del terreno, generamos el MDE. Tras calcular la normalización de la nube de puntos, utilizamos el algoritmo de segmentación de árbol único para clasificar la nube de puntos de árboles. Algunos árboles mal segmentados pueden editarse manualmente
manualmente.
Según el resultado de la segmentación, podemos extraer las especies de árboles, la posición, la altura del árbol, el diámetro a la altura del pecho (DBH), etc. de un solo árbol. También se puede generar el vector de la estructura del árbol.
Conclusión
Mediante la combinación del LiDAR UAV y los diversos datos obtenidos por el escáner SLAM móvil en la zona forestal, es posible obtener rápidamente una estructura vertical forestal de alta precisión, y extraer los parámetros de la estructura de un solo árbol de la parcela de muestra con mayor precisión y
eficiente.
En comparación con los métodos de estudio tradicionales, reduce significativamente la intensidad y los costes de mano de obra, enriquece los tipos de datos y mejora la calidad del seguimiento. Al mismo tiempo, es necesario planificar razonablemente la trayectoria de escaneado cuando se utilizan plataformas como ULS (escaneado láser UAV) y BLS (escaneado láser de mochila) para mejorar la eficiencia y la integridad de la recopilación de datos y aumentar la posibilidad de obtener información forestal a gran escala en menos tiempo.
Esta nueva aplicación de fusión de datos LiDAR tierra-aire tiene una gran importancia práctica.



