#Tendencias de productos
Actuadores lineales vs. actuadores rotativos: La elección clave para las articulaciones de robots humanoides
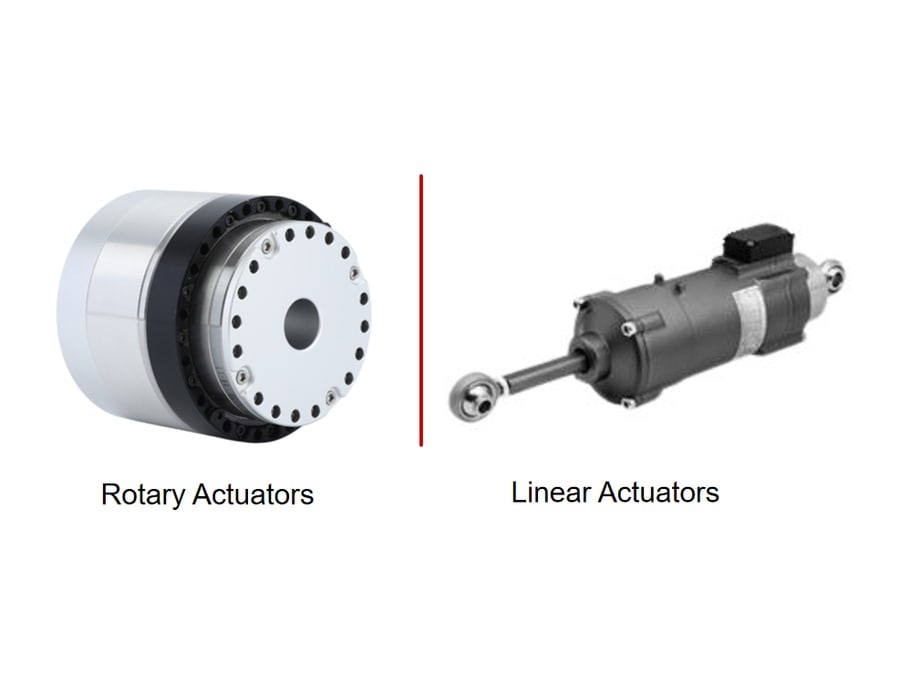
Los módulos de articulación de robots humanoides se pueden clasificar ampliamente en actuadores rotativos y lineales, cada uno adecuado para aplicaciones y requisitos de carga específicos.
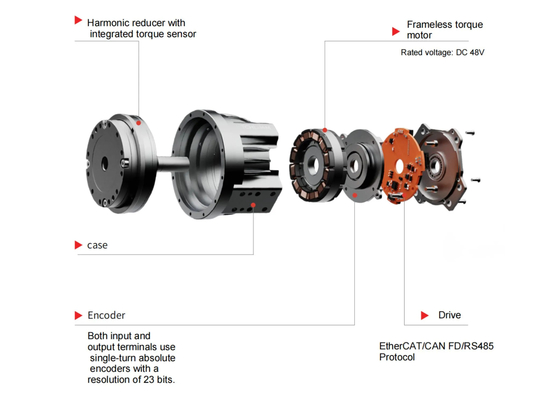
Los actuadores rotativos, a menudo utilizando reductores armónicos, planetarios o ciclóides, proporcionan alto par, amplio rango de rotación, alto rendimiento dinámico y gran integración, lo que los hace ideales para hombros, caderas y cintura. Los actuadores lineales, que emplean tornillos de rodillos planetarios o husillos de bolas, convierten el movimiento rotativo en lineal y destacan por su precisión y rigidez en articulaciones con rangos de movimiento pequeños, como rodillas, codos y tobillos, aunque tienen menor capacidad dinámica y mayores costes de integración. En última instancia, ambos tipos de actuadores presentan ventajas dependiendo de los requisitos de movimiento, las restricciones estructurales y las prioridades de rendimiento, siendo los actuadores rotativos —especialmente los de tipo Harmonic Drive— la elección predominante en el diseño de articulaciones de robots humanoides.