#Tendencias de productos
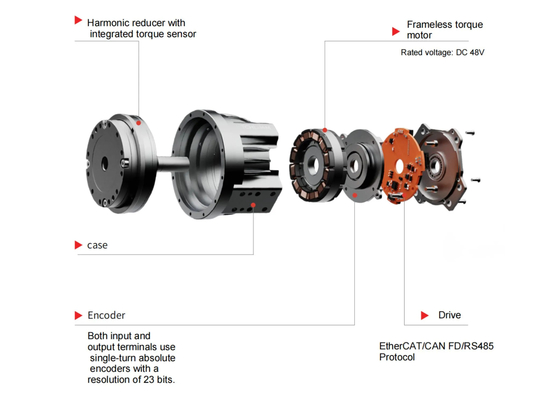
EtherCAT vs. CAN para motores Harmonic Drive: comparación técnica
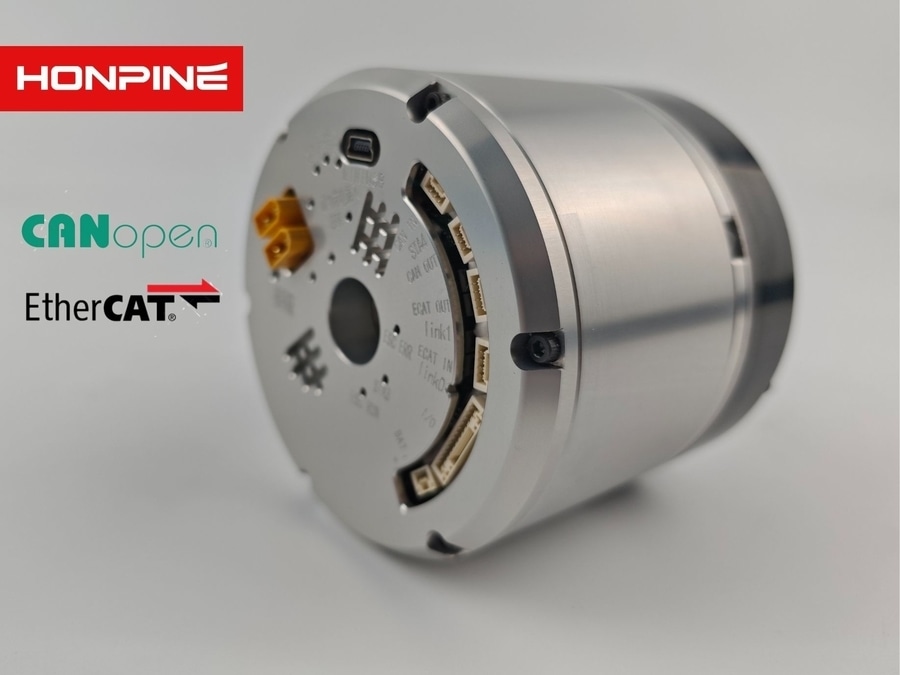
EtherCAT supera ampliamente a CAN gracias a su mayor ancho de banda, mejor sincronización en tiempo real y comunicación estable de alta velocidad, convirtiéndose en la opción principal para controlar motores Harmonic Drive en robótica avanzada.
En el control de motores Harmonic Drive, los protocolos de comunicación afectan directamente la precisión y la capacidad de respuesta. Aunque CAN es simple y económico, su ancho de banda de 1 Mbps, la susceptibilidad a colisiones en el bus, la sincronización limitada y la inestabilidad de los ciclos de comunicación restringen su uso a aplicaciones de baja demanda. EtherCAT, en cambio, ofrece transmisión de 100 Mbps, sincronización mediante reloj distribuido a nivel de microsegundos, ciclos estables de 4 kHz, opciones de cableado flexibles y una fuerte resistencia a interferencias. Estas ventajas permiten una coordinación multimotor precisa y en tiempo real en sistemas robóticos complejos. Por ello, EtherCAT se ha convertido en el estándar dominante en la robótica de alta gama, mientras que CAN se utiliza principalmente en aplicaciones menos exigentes o como red auxiliar.