#Tendencias de productos
Dominar el control PID: el motor oculto detrás de la precisión de las articulaciones robóticas
El control PID es la tecnología clave que permite a las articulaciones robóticas lograr movimientos estables, precisos y rápidos. Una correcta sintonización de los parámetros P, I y D —siguiendo la estructura de control de lazo interno a externo de c
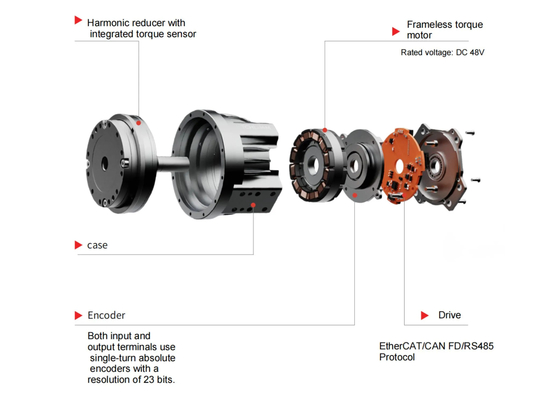
El control PID permite un movimiento preciso de las articulaciones robóticas mediante la acción coordinada de los términos proporcional, integral y derivativo, donde P determina la capacidad de respuesta, I elimina el error en estado estacionario y D suprime el sobreimpulso y las oscilaciones. Los módulos de articulación robótica suelen adoptar una estructura de tres lazos anidados —corriente, velocidad y posición— que debe ajustarse desde el lazo interno hacia el externo para garantizar la estabilidad. Aunque no existe una fórmula universal de ajuste, comprender la lógica fundamental del PID y adaptar los parámetros a las características de carga y a los requisitos de la aplicación permite optimizar el rendimiento de las articulaciones, logrando una respuesta rápida, alta precisión y un control fiable.