#Tendencias de productos
Sensores de Par Integrados vs. Externos en Módulos de Articulaciones Robóticas: Principales Compromisos de Ingeniería para Robots Humanoides y Colaborativos
Este artículo explora las diferencias y compromisos de ingeniería entre los sensores de par integrados y externos en módulos de articulaciones robóticas, comparando su impacto en la compacidad, fiabilidad, rendimiento dinámico, mantenimiento y futura
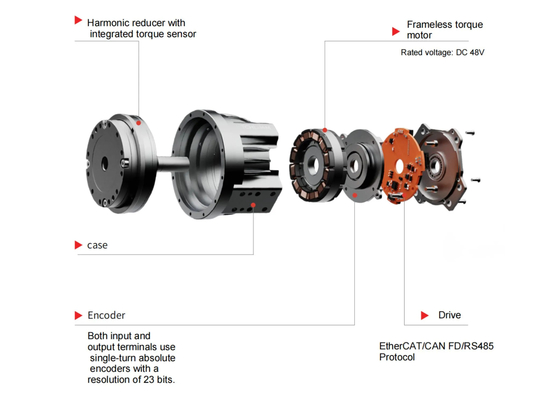
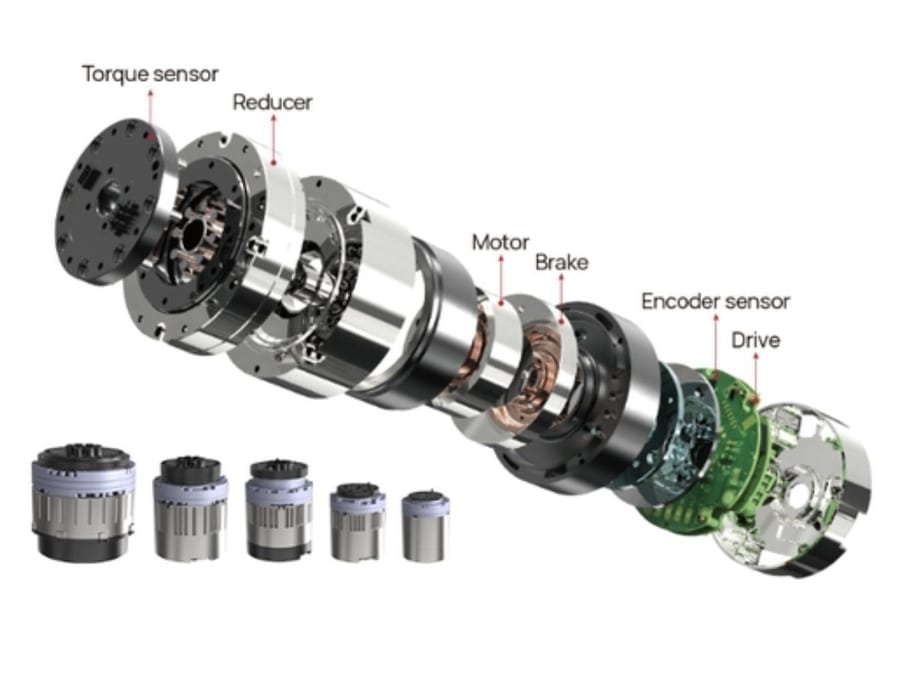
A medida que los robots humanoides y colaborativos continúan evolucionando, los sensores de par se han convertido en una tecnología esencial para lograr un control preciso de fuerza y una interacción flexible y segura. Este artículo analiza las dos arquitecturas dominantes de detección de par utilizadas en los módulos de articulaciones robóticas: los sensores de par integrados, profundamente incorporados en la estructura de la articulación para ofrecer compacidad, alta fiabilidad y un excelente rendimiento dinámico, y los sensores de par externos, que proporcionan mayor flexibilidad, mantenimiento más sencillo y gran utilidad en entornos de investigación y validación. Mediante la comparación de sus métodos de implementación, ventajas, limitaciones y escenarios de aplicación, el artículo destaca los principales compromisos de ingeniería entre integración, escalabilidad, mantenibilidad y rendimiento, ayudando a los ingenieros robóticos a seleccionar la solución de detección más adecuada para los sistemas robóticos de próxima generación.