Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Novedades de la industria
{{{sourceTextContent.title}}}
Cómo abordar los retos del ensamblaje de carcasas en sistemas de control de potencia y motores de nueva energía bajo diversas demandas de aplicación
{{{sourceTextContent.subTitle}}}
danikor, módulo de apriete flotante, sistemas robotizados de atornillado
{{{sourceTextContent.description}}}
En los vehículos de nueva energía, el motor y el sistema de control de potencia, que sustituyen la función del motor en los vehículos de combustible tradicionales, representan alrededor del 10% del valor total del vehículo, sólo superados por el sistema de baterías. Cuanto mayor es el valor que aporta, mayores son los retos técnicos de montaje a los que se enfrenta. ¿Cómo podemos mejorar de forma eficaz y sostenible la calidad del montaje? ¿Cómo podemos garantizar la cualificación del apriete de tornillos en condiciones de trabajo más complejas? ¿Qué soluciones de automatización para la alimentación y el apriete de tornillos corresponden a los distintos tipos de tornillos?
Frente a una serie de cuestiones desafiantes derivadas de las diferentes características de los productos de motor y sistemas de control de potencia, Danikor ha lanzado una variedad de soluciones de montaje innovadoras para hacer frente a estos problemas. Estas soluciones pretenden evitar fenómenos como el atasco de tornillos, las anomalías de apriete y los fallos de apriete durante el proceso de montaje, promoviendo así una mejora estable de la calidad de montaje de los productos de motor y control de potencia.
La parte de la carcasa del producto de motor y control de potencia no sólo proporciona protección física al sistema del motor, sino que también soporta impactos y vibraciones externas para reducir el riesgo de daños en el motor. Durante el montaje de producción por lotes, debido a problemas como la precisión de fabricación del producto, el proceso de montaje también se enfrenta a múltiples retos.
Reto 1: Poca consistencia de los productos de la carcasa
Punto crítico: Cuando la consistencia de los productos de la carcasa es deficiente, lo que provoca un posicionamiento impreciso de los orificios de los pernos, la solución tradicional es utilizar el posicionamiento y reconocimiento de cámaras 2D. Sin embargo, este método tiene desviaciones de ángulo espacial, y la imagen de la cámara no sólo afecta al ciclo de producción, sino que también incurre en elevados costes de hardware.
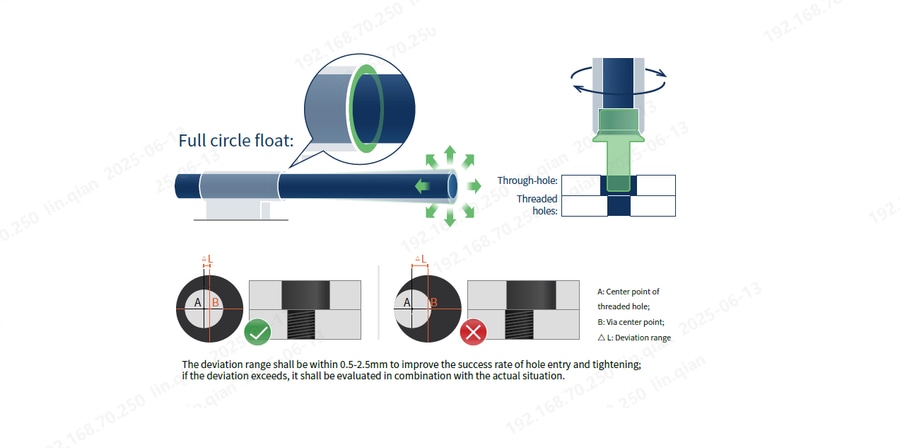
Solución: La tecnología de flotación por soplado y vacío hexagonal externo puede resolver fácilmente este problema. La distancia de flotación puede variar en función de los cambios en la longitud de evasión, con un rango de desviación de 0,5-2,5 mm. Esta tecnología mejora significativamente la tasa de éxito de la entrada y el apriete del agujero, y es más rentable y eficaz.
Reto 2: Espacio compacto para apriete síncrono multieje
Problema: Debido al gran número de pernos de fijación en la carcasa y al espacio compacto, los requisitos de disposición espacial para los mecanismos de apriete multieje son muy elevados. Los mecanismos de apriete tradicionales tienen una estructura compleja y ocupan mucho espacio.
Solución: El mecanismo de módulo de apriete integrado ahora puede lograr el apriete sincronizado de hasta 12 ejes de apriete. En comparación con los mecanismos tradicionales, es más compacto, con una reducción del peso del 20-30%, una reducción de la anchura del 60-70% y una reducción de la distancia entre ejes del 60%. El ajuste de la fuerza descendente es más flexible y cómodo. Además, no hay piezas móviles externas y los cables son fijos, lo que lo hace más adecuado para la integración con robots. Esta solución es especialmente adecuada para la disposición de la instalación en espacios reducidos y puede lograr el apriete de pernos con menor separación.