Añadir a mis favoritos
Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés
haga clic aquí
#Novedades de la industria
{{{sourceTextContent.title}}}
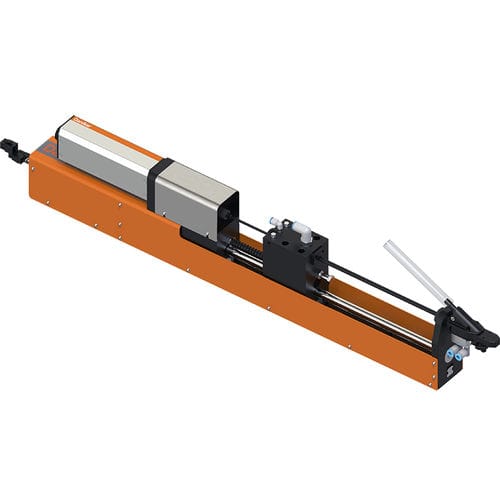
Destornillador Servoeléctrico - Tornillo Altura Flotante Estándar
{{{sourceTextContent.subTitle}}}
destornillador eléctrico servo, destornillador eléctrico con control de par, destornillador eléctrico de par ajustable
{{{sourceTextContent.description}}}
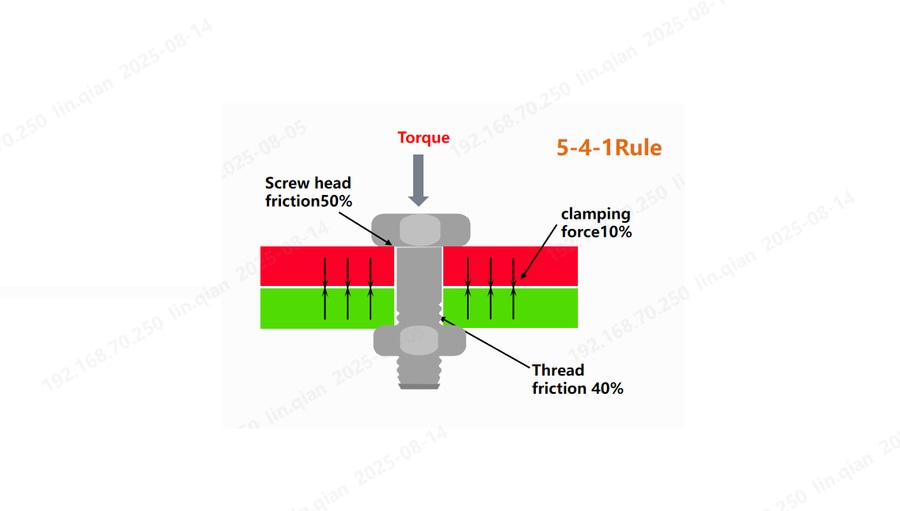
En una gran variedad de productos mecánicos, las uniones atornilladas son el método de unión más común. En la electrónica de consumo -televisores, teléfonos móviles, cámaras, etc.- se utilizan mucho los tornillos con diámetros nominales inferiores a 5 mm. Un problema frecuente en este caso es la "flotación": el tornillo no se aprieta hasta la profundidad especificada, pero el valor de par máximo alcanza el objetivo programado y el controlador cree que la unión está apretada. Esto puede dañar permanentemente el orificio roscado, por lo que evitar la flotación es una cuestión crítica de control de calidad.
¿Qué es la flotación del tornillo?
La flotación se produce cuando el tornillo no ha alcanzado la profundidad de asiento prevista, pero la curva par-tiempo ya muestra el par máximo establecido (por ejemplo, 0,7 N-m). A continuación, el motor se detiene, pero la profundidad real sigue siendo corta. En la curva "float-lock" adjunta, la herramienta se detiene a 0,7 N-m; el reapriete manual demuestra que sólo se trataba de un falso pico, no de un asentamiento real. Las causas típicas son rebabas en los orificios, rebabas en los tornillos, puntos elevados en la superficie de la pieza, etc.
Limitaciones de detección
Los atornilladores eléctricos convencionales no pueden detectar la holgura a menos que sea grave (≥ 2 mm). En la actualidad, la holgura se suele comprobar indirectamente mediante la comprobación del par de apriete o la medición láser de la distancia. Los comprobadores de par comparan el par suministrado con un valor de referencia, pero no pueden medir la profundidad real del tornillo.
Solución con servodestornillador
Un servoatornillador eléctrico utiliza un sensor de desplazamiento integrado para controlar la distancia de desplazamiento del tornillo en tiempo real. El controlador compara la profundidad medida con una posición de asiento preestablecida. Si la profundidad real está dentro de la tolerancia programada, se acepta la unión; en caso contrario, el sistema emite una señal de NG/alarma. Esto proporciona un estándar de flotación directo y programable en lugar de depender de comprobaciones indirectas del par de apriete.