Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
¿Cómo pueden los destornilladores eléctricos reducir el impacto del coeficiente de fricción?
{{{sourceTextContent.subTitle}}}
Destornilladores eléctricos dinamométricos
{{{sourceTextContent.description}}}
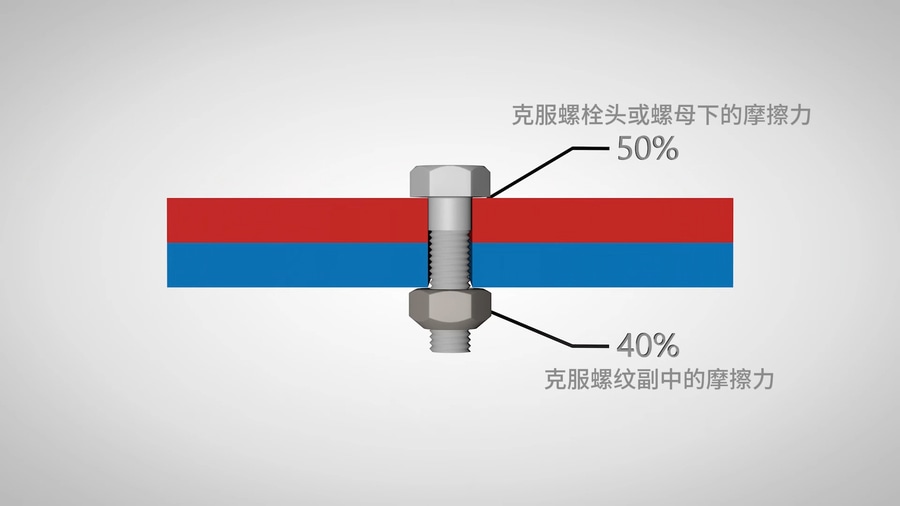
En el campo del montaje mecánico, las uniones atornilladas constituyen el método de unión más fundamental y crítico. La calidad de la fijación determina directamente la estabilidad operativa, la seguridad y la vida útil de los equipos. Sin embargo, aproximadamente el 90% del par de apriete durante el proceso de atornillado se consume en vencer la resistencia a la fricción. Esta característica significa que incluso pequeñas fluctuaciones en el coeficiente de fricción pueden causar desviaciones significativas en la fuerza de apriete final, creando así peligros potenciales ocultos de fallo del equipo. Para solucionar este problema, la estrategia de control compuesto de "par y ángulo" de los atornilladores eléctricos dinamométricos puede reducir eficazmente el impacto de las fluctuaciones del coeficiente de fricción en la fuerza de apriete, proporcionando una garantía fiable para un montaje de alta precisión.
Para comprender el efecto de las fluctuaciones del coeficiente de fricción en la fuerza de apriete de los tornillos, primero es necesario entender los principios mecánicos del apriete de tornillos. El proceso de apriete de pernos consiste esencialmente en convertir la salida de par del atornillador eléctrico dinamométrico en precarga del perno, generando así una fuerza de apriete fiable entre las piezas de trabajo para formar una estructura de conexión estable. Sin embargo, en el funcionamiento real, la mayor parte del par de apriete se utiliza para superar la fricción, incluida la fricción entre las roscas y la fricción en el extremo entre la cabeza del tornillo y la superficie de contacto de la pieza de trabajo. Estos dos componentes de la fricción representan hasta el 90% del consumo de par, y sólo un 10% del par se convierte realmente en fuerza de apriete. El coeficiente de fricción se ve influido por múltiples factores, como la precisión del mecanizado de la rosca y la cara frontal, la rugosidad de la superficie, las condiciones de lubricación, la compatibilidad de los materiales, etc. Los cambios sutiles en estos factores pueden provocar fluctuaciones en el coeficiente de fricción, causando desviaciones significativas en la fuerza de apriete bajo el mismo par de entrada, lo que no cumple los requisitos de montaje de alta precisión. La estrategia de control compuesto "Par y ángulo" de los atornilladores eléctricos dinamométricos consigue un ajuste dinámico y una alarma de anomalías mediante la supervisión simultánea de dos parámetros fundamentales -par y ángulo de rotación- y su comparación con umbrales preestablecidos.
I. Escenarios de alta fricción: Mecanismo de compensación de ángulo de los atornilladores eléctricos dinamométricos
En escenarios de alto coeficiente de fricción, debido al aumento de la resistencia a la fricción entre las roscas y las caras de los extremos, se produce fácilmente la situación de "el par cumple las normas pero el ángulo no" (el par alcanza el umbral preestablecido pero el ángulo de rotación no alcanza la carrera correspondiente). En este caso, la fuerza de apriete real suele ser insuficiente. Para solucionar este problema, la estrategia de control compuesto de los atornilladores eléctricos dinamométricos activa el mecanismo de compensación del ángulo: cuando el par alcanza primero el valor preestablecido, el atornillador eléctrico dinamométrico no se detendrá inmediatamente, sino que continuará impulsando el perno para que gire hasta que el ángulo de rotación alcance el umbral de ángulo preestablecido. Durante este proceso, el atornillador eléctrico de par supervisa continuamente los cambios de par en tiempo real. Si el par supera el límite superior de seguridad debido al aumento de la resistencia a la fricción, el atornillador eléctrico dinamométrico activará inmediatamente el mecanismo de alarma y se detendrá, evitando la deformación del perno, la fractura o el daño a las piezas conectadas debido a la sobrecarga. Esto garantiza tanto el cumplimiento de los estándares de fuerza de apriete como la seguridad durante el proceso de apriete.
II. Escenarios de baja fricción: Mecanismo de compensación del par de apriete de los destornilladores eléctricos dinamométricos
En escenarios de bajo coeficiente de fricción, donde la resistencia a la fricción es menor y la resistencia a la rotación del tornillo es baja, se produce fácilmente la situación de "el ángulo cumple las normas pero el par no" (el ángulo de rotación del tornillo alcanza la carrera preestablecida pero la salida de par del destornillador eléctrico dinamométrico aún no ha alcanzado el valor preestablecido). En este caso, la fuerza de apriete tampoco cumple los requisitos. Para esta condición de funcionamiento, la estrategia de control compuesta de los atornilladores eléctricos dinamométricos activa el mecanismo de compensación del par: cuando el ángulo alcanza primero el valor preestablecido, el atornillador eléctrico dinamométrico no deja de funcionar, sino que sigue manteniendo la potencia de salida hasta que el par alcanza el umbral preestablecido. Sólo después de asegurarse de que tanto el par como el ángulo se encuentran dentro de los umbrales de seguridad, se completará la acción de apriete y se detendrá la máquina. Este mecanismo de doble cumplimiento de normas evita fundamentalmente las limitaciones del control de un solo parámetro. A través de la monitorización colaborativa y la compensación dinámica de estos dos parámetros principales por parte del atornillador eléctrico dinamométrico, el impacto negativo provocado por las fluctuaciones del coeficiente de fricción se compensa eficazmente, manteniendo la fuerza de apriete constantemente estable dentro de un rango razonable.