Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
¿Cómo elegir entre los módulos de alimentación por soplado y de aspiración por vacío en el atornillado automático?
{{{sourceTextContent.subTitle}}}
Módulo de alimentación por soplado, módulo de aspiración por vacío, accionamiento automático de husillos
{{{sourceTextContent.description}}}
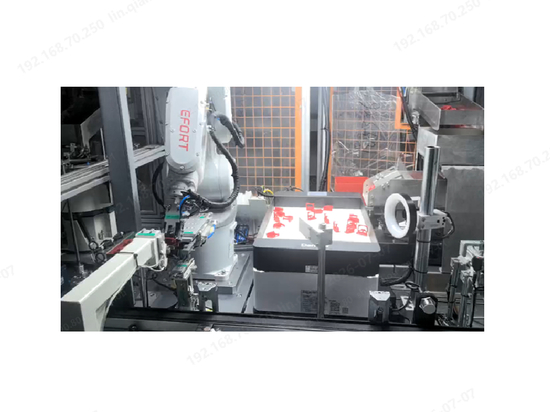
En los sistemas automáticos de atornillado, el método de alimentación afecta directamente a la estabilidad del apriete, la duración del ciclo y la adaptabilidad del puesto de trabajo. En la actualidad, las principales soluciones incluyen principalmente dos formas: alimentación por soplado y alimentación por succión al vacío. Estas dos difieren significativamente en los principios estructurales, los métodos de soporte del tornillo y la adaptabilidad espacial, por lo que debe hacerse una selección razonable de acuerdo con las condiciones de trabajo específicas.
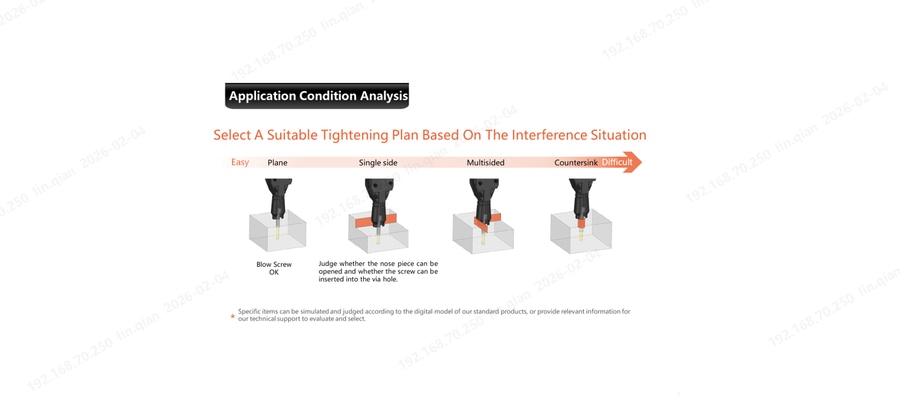
I. ¿Cuáles son las condiciones comunes de interferencia de apriete en la conducción automática de tornillos?
En las líneas de montaje automatizadas, según la complejidad de la estructura espacial alrededor de la posición del orificio de apriete, las condiciones comunes de interferencia pueden dividirse en cuatro categorías:
- No interferencia plana: Sin obstrucciones alrededor de la posición del orificio, menor dificultad de apriete
- Interferencia en un solo lado: Existen paredes o estructuras verticales a un lado de la posición del orificio, lo que requiere la evaluación de la dirección de apertura de la cabeza del destornillador
- Interferencia en varios lados: Existen interferencias en varias direcciones, lo que requiere normas más estrictas para la alimentación del tornillo y las trayectorias de entrada del orificio
- Interferencia de agujero avellanado: El punto de apriete está por debajo de la superficie del producto, con poca profundidad de agujero y distancia entre bordes, mayor dificultad de apriete
A medida que aumenta el grado de interferencia, también aumenta la dificultad de seleccionar los módulos de apriete.
Ante diferentes condiciones de interferencia de apriete, es necesario adoptar diferentes tipos de soluciones de módulos de apriete para garantizar que, al realizar el apriete, la cabeza del destornillador impulse el tornillo para que entre en el orificio suavemente y sin obstrucciones. Normalmente, existen dos tipos de módulos -de alimentación por soplado y de alimentación por succión- para eliminar los efectos de interferencia y garantizar el éxito del apriete. Entonces, en diferentes condiciones de interferencia, ¿qué reglas se utilizan para elegir entre las formas de alimentación por soplado o alimentación por succión?
II. ¿Qué es un módulo de alimentación por soplado? ¿Cuál es su principio de funcionamiento?
Un módulo de alimentación por soplado es una solución automática de alimentación y apriete de tornillos que transporta los tornillos al cabezal del atornillador mediante flujo de aire. Su flujo de trabajo típico incluye:
Los tornillos se transportan por soplado hasta el cabezal del atornillador mediante un flujo de aire
Las mordazas de apriete del cabezal del atornillador sujetan el tornillo y exponen una longitud determinada
El módulo se desplaza a la posición del orificio de apriete
Las mordazas de apriete se abren y ejecutan la acción de apriete
Este método tiene una estructura sencilla y un ciclo de acción rápido, por lo que es una solución habitual en el atornillado automático.
III. ¿Qué condiciones de interferencia son adecuadas para seleccionar módulos de alimentación por soplado?
Cuando se cumplen las siguientes condiciones, los módulos de alimentación por soplado son recomendaciones prioritarias:
Imagen que muestra tres escenarios con parámetros dimensionales:
① Cuando L-L1-d-2 > H, seleccione la forma de alimentación por soplado;
② Cuando L-L1-d-2 < H, y S > B/2, la forma de alimentación por soplado es opcional;
③ Si la dirección A-A no funciona, gire la cabeza del destornillador 90°, y cuando S > A/2, la forma de alimentación por soplado es opcional;
- Adecuado para condiciones de apriete planas sin interferencia o con interferencia de un solo lado
- Para interferencia de un solo lado, ambas direcciones izquierda-derecha y delante-detrás cumplen los requisitos de espacio de movimiento de la cabeza del destornillador
- Después de que el tornillo es soportado por las mordazas de apriete, expone una cierta longitud y se le permite pasar a través del agujero de apriete aproximadamente 2mm
- La dirección de apertura de la mordaza de sujeción no chocará con la estructura de la pieza de trabajo
IV. ¿Qué es un módulo de succión por vacío? ¿Cuál es la diferencia con los módulos de alimentación por soplado?
Los módulos de succión por vacío introducen una estructura de adsorción por vacío basada en la alimentación por soplado. Sus características principales son:
- Después de sujetar el tornillo en la cabeza del atornillador - El tornillo se recoge a través del tubo de succión mediante adsorción por vacío - El tubo de succión envía el tornillo a la posición del orificio de apriete - A continuación, completa la acción de apriete
En comparación con los módulos de alimentación por soplado, los módulos de succión por vacío tienen una mayor adaptabilidad en condiciones de interferencia complejas.
V. ¿Qué condiciones de interferencia son adecuadas para seleccionar los módulos de succión por vacío?
Imagen de los parámetros dimensionales del módulo de succión
- Cuando S > D/2+2, se puede seleccionar la forma de aspiración
- Cuando la relación longitud/diámetro del tornillo es favorable para el soplado, utilice el módulo de soplado más aspiración
- Cuando la relación longitud-diámetro del tornillo es demasiado pequeña e inadecuada para el soplado, utilice el módulo pick-and-place
Frente a diferentes espacios de instalación y condiciones de interferencia, la selección del módulo de apriete adecuado es el requisito previo fundamental para garantizar la eficacia del montaje y la calidad del apriete.