Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Novedades de la industria
{{{sourceTextContent.title}}}
¿Cómo consigue un destornillador dinamométrico eléctrico controlar el par y el ángulo?
{{{sourceTextContent.subTitle}}}
Destornillador eléctrico dinamométrico, destornillador eléctrico industrial, servodestornillador inteligente
{{{sourceTextContent.description}}}
En los campos de la fabricación de automóviles, la industria aeroespacial y el montaje de equipos electrónicos de precisión, la calidad del proceso de fijación determina directamente la seguridad y durabilidad del producto. Como herramienta "estrella" de la cadena de montaje, el atornillador eléctrico dinamométrico ha sustituido hace tiempo a las herramientas neumáticas tradicionales y se ha convertido en el estándar de la fijación de alta precisión. Entonces, ¿cómo garantiza exactamente un atornillador eléctrico dinamométrico que cada tornillo cumpla con precisión los requisitos preestablecidos? Este artículo analizará en profundidad cómo los atornilladores eléctricos de par utilizan estos dos componentes básicos para lograr un control de bucle cerrado del par y el ángulo.
Las primeras herramientas de apriete se basaban en el desembrague o en la experiencia del operario para tomar decisiones, un método muy influenciado por el entorno, la fricción y los factores humanos. La esencia de un atornillador eléctrico de par moderno es un sistema integrado electromecánico miniaturizado que combina un servomotor, un mecanismo de reducción de precisión y un sistema de detección inteligente.
Un destornillador eléctrico dinamométrico sólo tiene dos tareas principales:
¿Cuánta fuerza emitir? (Control del par)
¿Cuántas vueltas hay que apretar? (Control del ángulo)
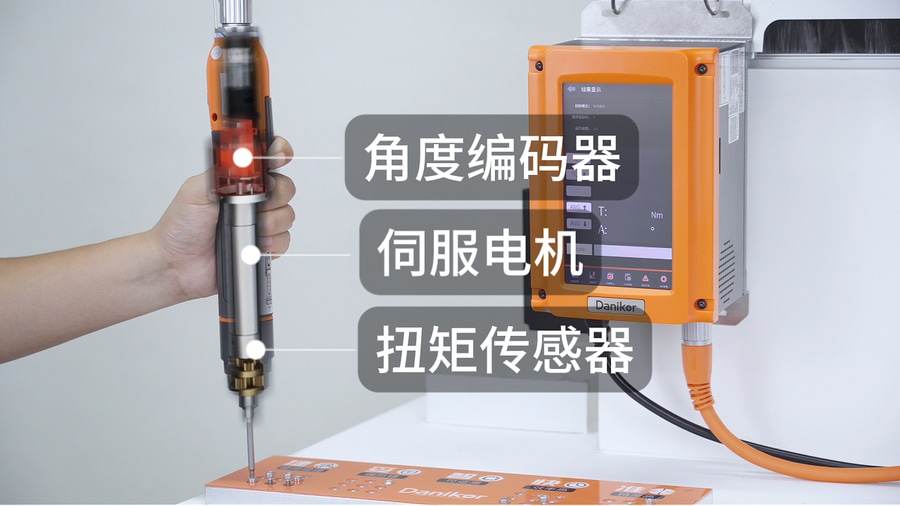
Para realizar estas dos tareas, el atornillador eléctrico dinamométrico construye internamente un complejo sistema de retroalimentación en tiempo real, que se basa en la estrecha colaboración de dos "sensores" principales: el sensor de par y el codificador angular.
I. Sensor de par: El "sentido del tacto" del destornillador eléctrico dinamométrico
El par es el indicador más intuitivo para evaluar la calidad de la fijación. Los atornilladores eléctricos dinamométricos suelen utilizar sensores de par dinámicos para obtener datos en tiempo real.
Principio de funcionamiento: Las galgas extensométricas de resistencia de alta precisión suelen acoplarse al eje de accionamiento del atornillador eléctrico dinamométrico. Cuando el destornillador eléctrico dinamométrico emite potencia, el eje de accionamiento produce una diminuta deformación elástica de torsión. Esta deformación hace que cambie la resistencia de las galgas extensométricas, que se convierte en señales de tensión a nivel de microvoltios a través de un puente de Wheatstone.
Medición dinámica y retroalimentación de bucle cerrado: A diferencia de las llaves dinamométricas estáticas, los atornilladores dinamométricos eléctricos realizan mediciones dinámicas durante la rotación. El sensor está situado en el extremo de salida del reductor, capaz de detectar directamente el par real aplicado al tornillo. Una vez que el par medido alcanza el valor preestablecido, el sistema de control envía inmediatamente una orden de frenado al motor.
II. Codificador angular: Los "ojos" del destornillador eléctrico dinamométrico
Si el sensor de par se encarga de percibir la "fuerza", el codificador angular se encarga de registrar el "desplazamiento" En los atornilladores eléctricos dinamométricos, el control del ángulo es crucial para identificar el fenómeno del "falso par".
Principio de funcionamiento: Los atornilladores eléctricos de par suelen utilizar encóderes incrementales o magnéticos integrados en la parte trasera del servomotor. Por cada rotación del motor, el codificador genera un número determinado de señales de impulsos. Dado que el destornillador eléctrico de par está equipado internamente con un reductor de alta relación, el controlador puede obtener la resolución angular precisa del eje de salida calculando el ángulo de rotación del motor y dividiéndolo por la relación de reducción.
Proceso de control: Durante el proceso de fijación, el atornillador eléctrico de par gira primero en modo de par hasta el punto de asiento, normalmente un umbral de par pequeño (por ejemplo, el 10% del par final). A continuación, el codificador empieza a contar. Al supervisar el ángulo girado desde el punto de asiento hasta el punto final, el atornillador eléctrico dinamométrico puede determinar si la rosca está pelada o si hay objetos extraños que causen una condición de "flotación".
Conclusión
El control de par único tiene sus defectos. Por ejemplo, si quedan restos atrapados entre las roscas, el atornillador eléctrico dinamométrico puede alcanzar rápidamente el par de apriete preestablecido, pero el tornillo no se aprieta realmente. Para resolver estos problemas, los atornilladores eléctricos de par adoptan una estrategia compuesta de "control de par + monitorización de ángulo" o "control de ángulo + monitorización de par" Esta arquitectura de control dual en bucle cerrado transforma con éxito el complejo proceso de apriete mecánico en operaciones digitales cuantificables, supervisables y programables.