Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
Solución para el apriete automático de tornillos de abajo arriba
{{{sourceTextContent.subTitle}}}
Apriete automático de tornillos de abajo a arriba, solución de atornillado automático, aprietatuercas eléctrico industrial
{{{sourceTextContent.description}}}
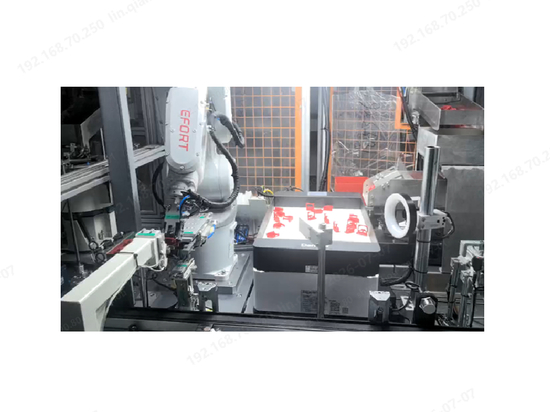
En los procesos de montaje automatizados, el apriete de tornillos de abajo a arriba es una operación muy complicada. Dado que la dirección de la gravedad es opuesta a la dirección de apriete, los tornillos son propensos a retroceder, inclinarse o incluso caer antes de entrar en el orificio roscado. Esto no sólo afecta a la eficacia del montaje, sino que también puede provocar fallos en el equipo o daños en el producto. Entonces, ¿cómo puede resolverse eficazmente este problema?
1. ¿Por qué es fácil fallar al apretar los tornillos de abajo hacia arriba?
En los sistemas automáticos de alimentación de tornillos tradicionales, los tornillos suelen llegar a la broca del atornillador por gravedad o por flujo de aire. Cuando la dirección de apriete cambia a ascendente, la propia gravedad del tornillo se convierte en un factor de inestabilidad, lo que suele provocar los siguientes problemas:
Retroceso del tornillo: Antes de que la broca esté completamente presionada contra el tornillo, éste puede deslizarse hacia abajo debido a la gravedad.
Caída del tornillo: Una sujeción inestable o una alimentación inadecuada del tornillo pueden provocar la caída del tornillo justo antes de que comience el apriete.
Entrada oblicua: La desalineación o la insuficiente perpendicularidad entre el tornillo y el orificio roscado pueden provocar atascos, desprendimiento de la rosca o fallos en el apriete.
Estos problemas son especialmente importantes en espacios reducidos y montajes multiángulo, que requieren un mecanismo de alimentación y apriete estructuralmente estable. Especialmente en el montaje de carrocerías de automóviles, las posiciones de los pernos y los orificios roscados suelen estar estrictamente limitadas por la estructura de la carrocería, lo que obliga a realizar las operaciones de apriete en espacios muy reducidos. La dificultad aumenta considerablemente cuando se aprietan los tornillos de abajo arriba. Además, bajo la influencia de la gravedad, los tornillos pueden desviarse fácilmente de su trayectoria, dificultando la entrada precisa y vertical en el orificio roscado, lo que complica aún más la operación de apriete.
2. La solución de Danikor
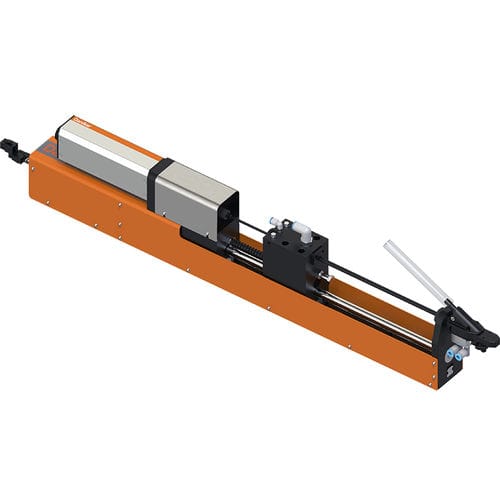
2.1 Módulo de alimentación por soplado con mecanismo de retención de tornillos
El módulo de alimentación por soplado es un método común de alimentación de tornillos en el atornillado automático. Su principio utiliza aire comprimido para soplar el tornillo desde el sistema de alimentación hasta el extremo delantero de la herramienta de apriete. Sin embargo, cuando se aprietan tornillos de abajo a arriba, el tornillo tiende a retroceder debido a la gravedad después de alcanzar la posición de apriete. Para solucionar este problema, se puede utilizar un módulo de alimentación por soplado con un mecanismo de retención del tornillo.
El núcleo del mecanismo de retención de tornillos reside en el diseño de su bloque de sujeción, que garantiza que el tornillo permanezca vertical y estable. Además, la distancia a la que el tornillo sobresale del bloque de sujeción es crucial. Una distancia de protrusión adecuada garantiza que el tornillo pueda entrar suavemente en el orificio a apretar, evitando fallos de apriete causados por una entrada anormal.
2.2 Módulo de alimentación por succión con adsorción por vacío para condiciones de interferencia
Cuando existen interferencias espaciales en el entorno de montaje (como espacios reducidos u obstáculos circundantes), puede resultar difícil desplegar un módulo de alimentación por soplado. En tales casos, el módulo de alimentación por succión se convierte en una mejor opción.
El módulo de alimentación por succión utiliza la tecnología de adsorción por vacío, sujetando firmemente el tornillo en la parte delantera de la broca mediante presión negativa, sustituyendo a la sujeción mecánica tradicional. Puede evitar diversas interferencias para adaptarse a condiciones de trabajo complejas. La aspiración por vacío también proporciona un soporte más estable y permite detectar la caída del tornillo mediante el control de la presión negativa. Junto con estrictas técnicas de procesamiento de la broca, garantiza la concentricidad y perpendicularidad durante la adsorción, manteniendo así la estabilidad del tornillo durante el apriete de abajo arriba.
La estabilidad de los tornillos de apriete de abajo arriba afecta directamente al rendimiento y la eficacia de las líneas de montaje automatizadas. Tanto si se trata de conseguir una sujeción eficaz mediante un módulo de alimentación por soplado combinado con un mecanismo de retención de tornillos, como de garantizar la concentricidad y perpendicularidad utilizando la adsorción por vacío de alta precisión de un módulo de alimentación por succión, la clave reside en seleccionar la solución técnica adecuada en función de las condiciones de trabajo reales y controlar estrictamente el diseño estructural y la precisión de procesamiento.
Sólo solucionando los problemas aparentemente menores pero profundamente impactantes del "retroceso" y la "caída" podremos lograr realmente operaciones de apriete automatizadas estables, eficientes e inteligentes.