Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
Cómo crear una plataforma de movimiento 6DOF
{{{sourceTextContent.subTitle}}}
para Simulador(Carreras/Vuelo/Entrenamiento/Tronco)
{{{sourceTextContent.description}}}
Componentes del sistema de movimiento 6DOF
El sistema de movimiento 6DOF consta de plataforma de movimiento, actuadores eléctricos, sistema de accionamiento del motor, controlador, etc.
Entre ellos, la plataforma de movimiento inferior está conectada al suelo, mientras que la plataforma superior soporta la carga útil.
En cuanto a los actuadores del simulador, elija el modelo adecuado en función de sus necesidades.
Sé que muchos de ustedes tendrán curiosidad sobre "¿Cuánta carga útil necesito para la plataforma del sistema de movimiento UNI 6DOF?"
Bueno, eso depende de sus necesidades. Pero la carga única del valor del actuador no es la carga útil dividida por seis. Esto es fácil de entender. Si la plataforma se inclina hacia un lado, entonces el centro de gravedad es desigual. Una sola carga del actuador no es capaz de soportar una carga pesada. También reducirá la elevación del husillo de bolas. También hay que tener en cuenta el peso de la cabina y del monitor.
Normalmente, el motor y el accionamiento vienen junto con el kit de actuadores. Los servomotores DC/AC son los más populares. El motor accionará el actuador eléctrico después de recibir las señales del sistema de control. Puede controlar la posición y velocidad con precisión y facilidad. Sin embargo, los sistemas DC son más baratos. Además, se requiere una fuente de alimentación. Como resultado, por favor asegúrese de que la potencia de la fuente es el doble de la potencia del motor.
El sistema de control por ordenador está programado para controlar la carrera y la velocidad de los actuadores lineales eléctricos para realizar el movimiento de múltiples grados de libertad de la plataforma de movimiento en el espacio tridimensional. Específicamente, la plataforma de movimiento es libre de cambiar de posición como hacia adelante / atrás (oleaje), arriba / abajo (oleaje), izquierda / derecha (balanceo) la traducción en tres ejes perpendiculares, combinado con cambios en la orientación a través de la rotación alrededor de tres ejes perpendiculares, a menudo denominado guiñada (eje normal), cabeceo (eje transversal), y rollo (eje longitudinal).
Si no tiene experiencia en la fabricación del sistema de control, nuestro equipo de ingenieros puede ayudarle. El controlador UNI Tech integra cualquier software que pueda exportar datos de telemetría en cualquier protocolo. Nuestro controlador puede ser compatible con softwares como Real engine, unity, etc. La solución plug and play cubre el 100% de las necesidades de los clientes en todo el mundo.
Una breve descripción de los principales componentes
1)Plataforma de movimiento
La plataforma superior se conecta al mecanismo simulado, como la cabina, el asiento de conducción o la cabina de vuelo, etc.
En cuanto a las juntas de montaje, las juntas universales son las más comunes, ya que permiten una rotación de hasta 35 grados. La junta articulada superior conecta la plataforma superior al vástago del pistón de los actuadores eléctricos. Mientras tanto, la junta articulada inferior conecta la base inferior fija a la cubierta trasera de los actuadores.
La carrera, la velocidad y la carga útil de la plataforma pueden personalizarse en función de los requisitos de los clientes.
La plataforma inferior se monta en el suelo para fijar proponer. Además, las articulaciones de conexión están disponibles para un mayor grado de rotación. Por ejemplo, la plataforma del sistema de movimiento 6DOF con articulaciones giratorias en ambos extremos hasta 360 grados de rotación.
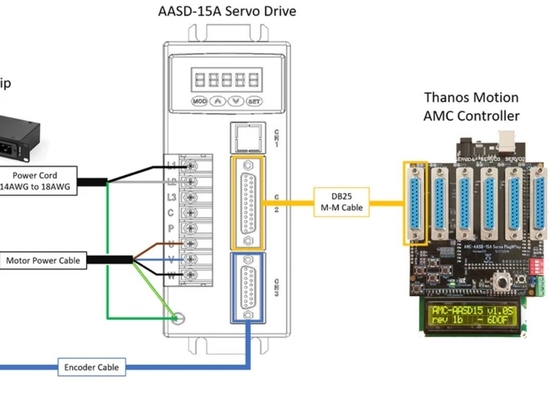
2)El hardware del sistema de control por ordenador
La unidad de control de movimiento: la aplicación de la unidad de servo control que implica controlador del motor como el receptor de la señal de movimiento para realizar el inicio y la pausa de toda la plataforma de movimiento.
Además, recibe la señal de control enviada por el ordenador central, controla el movimiento de los cilindros eléctricos, supervisa el controlador del motor servo y el movimiento de todo el sistema de control, procesa el mal funcionamiento, así como la protección de seguridad.
La unidad de proceso de señales: procesa todas las señales de los sensores relacionadas con el sistema de la plataforma de movimiento, la señal de prueba y la señal digital de E/S, así como el accionamiento del servomotor. Por ahora, utilizamos un conjunto completo del sistema de control, podemos proporcionar si es necesario.
3. El software de control
En cuanto al software del ordenador de control de movimiento, hay software de control de movimiento y software de control lógico incluidos, que pueden ser controlados simplemente conectándose a un ordenador. Nuestro software incluye: 1. 1.Recepción de datos de los juegos; 2.Motion cueing; 3.Motion cueing feedbacks a la plataforma de movimiento.
Para aquellos que tienen la intención de construir una plataforma de movimiento DIY 6DOF o una entretenida plataforma multigrado de libertad, la acción del jugador puede ser capturada por un software de juego comprado. Además, la señal de acción se enviará al controlador conectado a los actuadores eléctricos para que el conductor accione los cilindros eléctricos para la extensión y retracción, lo que puede realizar una experiencia de simulación inmersiva.