Ver traducción automática
Esta es una traducción automática. Para ver el texto original en inglés haga clic aquí
#Tendencias de productos
{{{sourceTextContent.title}}}
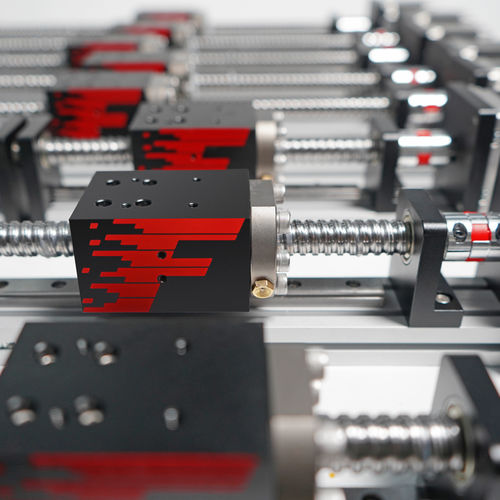
Cómo reducir el tamaño de un actuador lineal
{{{sourceTextContent.subTitle}}}
Solución para etapas X-Y y pequeños centros de mecanizado, como impresoras 3D.
{{{sourceTextContent.description}}}
Los actuadores lineales vienen en una amplia gama de tamaños, pero en los últimos años, los fabricantes han estado haciendo hincapié en las huellas cada vez más compactas. Pero no importa cuán pequeño sea el actuador, la adición de un motor puede hacer que el tamaño total del sistema completo sea demasiado grande para aplicaciones con limitaciones de espacio. Algunos fabricantes están abordando esta cuestión mediante la integración de un motor y un husillo de rosca (o de bolas) en un conjunto, en lo que comúnmente se denominan actuadores híbridos.
La variación más común del diseño híbrido es un motor paso a paso con un tornillo de plomo integrado, ya que los dos componentes tienen especificaciones similares de carga, velocidad y fuerza de empuje. Y es aquí donde la disposición integrada proporciona el mayor beneficio, ya que las cargas y fuerzas requeridas en las aplicaciones de husillo de plomo son típicamente más pequeñas y más adecuadas para un diseño sin guía externa (es decir, sin ejes lineales o rieles para soportar la carga). Sin embargo, las guías pueden integrarse en actuadores híbridos, lo que les confiere una mayor versatilidad para su uso en aplicaciones como los sistemas de posicionamiento de precisión, en los que es necesario soportar una carga mientras se mueve.
La base de un actuador híbrido es un motor de eje hueco. En lugar del diseño común del motor, que incluye un simple eje de transmisión que pasa por el centro del rotor, el eje del tornillo o la tuerca se monta dentro del rotor. Cuando el eje del tornillo se monta dentro del rotor, la configuración se denomina a veces conjunto de tornillo conducido, y cuando la tuerca del tornillo se monta dentro del rotor, la configuración se denomina comúnmente conjunto de tuerca conducido.
La configuración del tornillo impulsado es muy similar a la de un montaje de tornillo tradicional en cuanto a la fijación de los extremos, en la que uno de los extremos del tornillo está apoyado en uno o dos cojinetes axiales y acoplado al motor, mientras que el extremo opuesto está "libre" (no apoyado) o apoyado en uno o dos cojinetes axiales. La diferencia en un actuador híbrido de tornillo impulsado es que el extremo impulsado del tornillo está montado directamente en el rotor del motor y está apoyado por cojinetes dentro del rotor. No se necesitan cojinetes externos ni acoplamiento de tornillo a motor. Como en un montaje de tornillo tradicional, la tuerca se monta externamente al motor, y la rotación del tornillo mueve la tuerca a lo largo del eje del mismo.
En la configuración de la tuerca impulsada, el movimiento puede ocurrir de una de estas dos maneras: la combinación tuerca/motor puede ser restringida para que el eje del tornillo se desplace hacia adelante y hacia atrás mientras el motor gira la tuerca; o el eje del tornillo puede ser restringido para que el conjunto motor/tuerca se mueva a lo largo del tornillo estacionario. Cuando el eje del tornillo está constreñido y no se le permite girar, normalmente se pueden alcanzar velocidades más altas, ya que se evita el "azote" (el efecto de tipo cuerda de salto que se produce cuando un tornillo gira muy rápidamente). Normalmente se monta un cojinete axial en la circunferencia exterior de la tuerca del tornillo (dentro del rotor del motor) para absorber las fuerzas de empuje.
Junto con el beneficio del tamaño compacto, el hecho de tener menos conexiones mecánicas puede reducir el cumplimiento general del sistema, en comparación con sistemas similares que incorporan un motor acoplado externamente a un tornillo. En los sistemas sin guías lineales, las principales áreas de aplicación de los actuadores híbridos implican empujar o tirar de cargas relativamente ligeras, o un posicionamiento preciso, como en las aplicaciones de enfoque y exploración