#Tendencias de productos
Selección del motor adecuado para aplicaciones de movimiento lineal
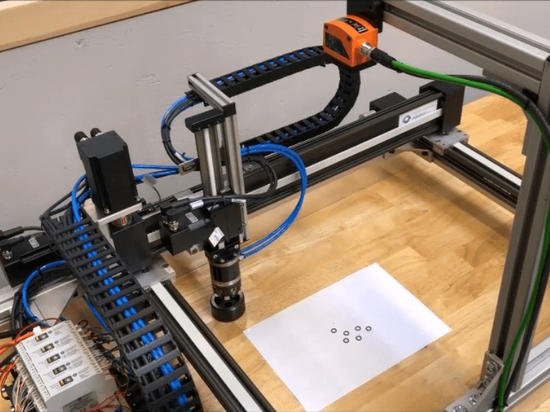
Los sistemas de movimiento lineal se encuentran dentro de innumerables máquinas, incluidos los sistemas de corte por láser de precisión, equipos de automatización de laboratorio, máquinas de fabricación de semiconductores, máquinas CNC, automatizació
Van desde lo relativamente simple, como un actuador de asiento económico en un vehículo de pasajeros, hasta un complejo sistema de coordenadas multieje completo con electrónica de control y accionamiento para el posicionamiento en bucle cerrado. No importa cuán simple o complejo sea el sistema de movimiento lineal, en el nivel más básico, todos tienen una cosa en común: mover una carga a través de una distancia lineal en un período de tiempo específico.
Una de las preguntas más comunes al diseñar un sistema de movimiento lineal se centra en la tecnología del motor. Una vez que se elige la tecnología, se debe dimensionar el motor para satisfacer las demandas de aceleración de la carga, superar la fricción en el sistema y superar el efecto de la gravedad, todo mientras se mantiene una temperatura máxima de funcionamiento segura. El par, la velocidad, la potencia y la capacidad de posicionamiento del motor son una función del diseño del motor, junto con el accionamiento y el control.
¿CON QUÉ MOTOR DEBO ARRANCAR?
Hay muchas cuestiones de aplicación a tener en cuenta al diseñar un sistema de movimiento lineal utilizando una tecnología de motor en particular. Una explicación exhaustiva de todo el proceso está más allá del alcance de este artículo. La intención es que piense en hacer las preguntas correctas cuando hable con un proveedor de motores.
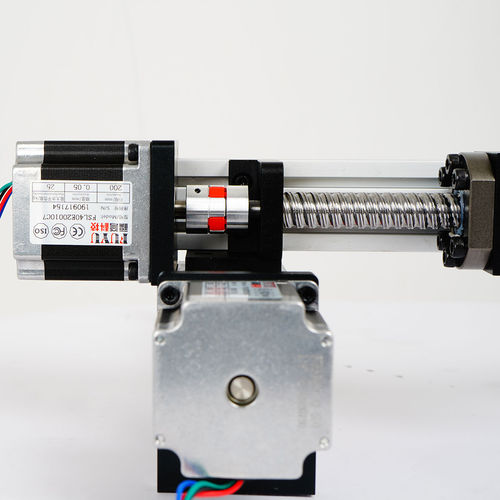
No existe el mejor motor para cada aplicación, sino el mejor motor para una aplicación en particular. En la gran mayoría de las aplicaciones de movimiento incremental, la elección será un motor paso a paso, un motor de CC con escobillas o un motor de CC sin escobillas. Los sistemas de movimiento más complejos pueden utilizar motores lineales acoplados directamente a la carga, evitando la necesidad de conversión de potencia mecánica; no hay necesidad de traslación a través de un husillo de avance/husillo de bolas, caja de engranajes o sistema de poleas. Aunque se puede lograr la máxima precisión, repetibilidad y resolución de posicionamiento con servosistemas lineales de accionamiento directo sin núcleo, son los de mayor costo y complejidad en comparación con los motores rotativos. Una arquitectura que utiliza motores rotativos es mucho menos costosa y cumplirá con la mayoría de las aplicaciones de movimiento lineal; sin embargo, se necesita algún medio de conversión de "rotativo a lineal" (y, como resultado, conversión de energía) para impulsar la carga.
Los motores paso a paso, con escobillas y sin escobillas se consideran motores de CC; sin embargo, existen sutilezas que harán que un ingeniero prefiera un tipo sobre los otros dos en una aplicación particular. Debe enfatizarse que esta elección depende en gran medida de los requisitos de diseño del sistema, no solo en términos de velocidad y par, sino también de los requisitos de precisión de posicionamiento, repetibilidad y resolución. No existe un motor perfecto para cada aplicación, y todas las decisiones requerirán compensaciones de diseño. En el nivel más básico, todos los motores, ya sean de CA o CC, con escobillas, sin escobillas o cualquier otro motor eléctrico, funcionan según el mismo principio de la física para generar par: la interacción de los campos magnéticos. Sin embargo, existen diferencias dramáticas en la forma en que estas diversas tecnologías de motores responden en aplicaciones particulares. El rendimiento general del motor, la respuesta y la generación de par dependen del método de excitación de campo y la geometría del circuito magnético inherentes al diseño físico del motor, el control de la tensión y la corriente de entrada por parte del controlador/variador y el método de retroalimentación de velocidad o posición, si el requiere la aplicación.
Las tecnologías de motor paso a paso de CC, servo de escobillas y servomotor sin escobillas utilizan un suministro de CC para alimentarlas. Para aplicaciones de movimiento lineal, esto no significa que se pueda aplicar una fuente fija de CC directamente a los devanados del motor; Se necesita electrónica para controlar la corriente del devanado (relacionada con el par de salida) y el voltaje del devanado (relacionado con la velocidad de salida). A continuación se incluye un resumen de las fortalezas y debilidades de las 3 tecnologías.